Fanuc机器人仿真软件ROBOGUIDE操作指南
版权申诉
"fanuc机器人仿真软件操作手册"
本手册详细介绍了FANUC机器人仿真软件的使用,主要包括软件安装、注册、工作单元(Workcell)的创建、变位机的创建与协调功能、机器人行走轴的设定以及添加外围设备和仿真录像的制作等内容。
1. **第一章概述**
- **1.1 软件安装**
FANUC的ROBOGUIDE仿真软件版本为V6.407269,需先安装SimPRO,再安装WeldPro。安装后需注册,未注册时有30天试用期。
- **1.2 软件注册**
通过运行WeldPRO并点击“Help/RegisterWeldPRO”进行注册,注册后可获得200天的使用权限。
- **1.3 新建Workcell**
工作单元的创建有多种方式,通常选择“根据缺省配置新建”,并选择对应的机器人控制器软件版本(如V6.**对应R-J3iB,V7.**对应R-30iA)和应用软件(如ArcTool(H541))。
2. **第二章 创建变位机**
- **3.1 利用自建数模创建**
提供了快速简易方法和导入外部模型方法,以满足不同用户需求。
- **3.2 利用模型库创建**
用户可以选择导入默认配置的模型库变位机,或者手动装配模型库变位机。
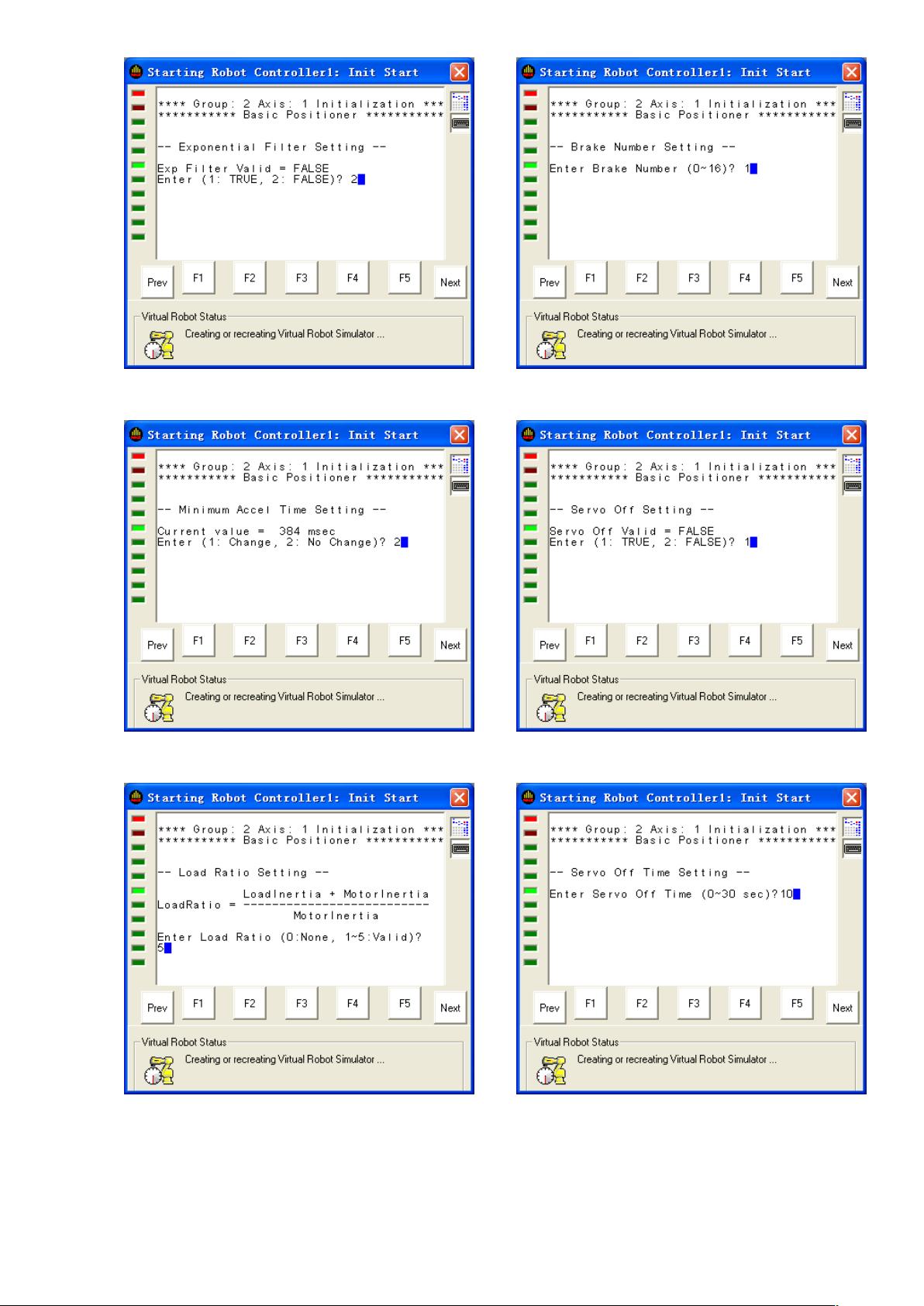
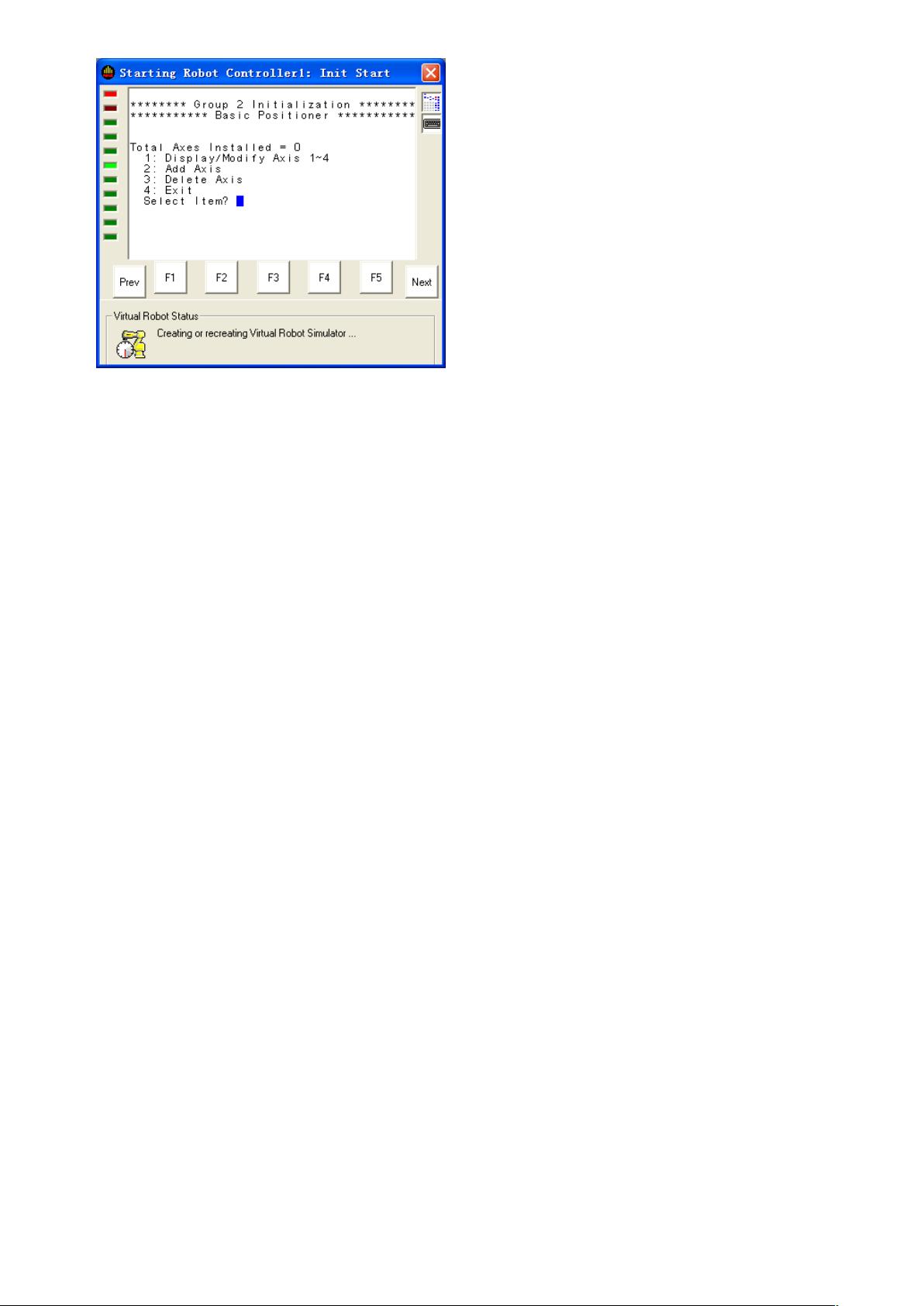
3. **第三章 创建机器人行走轴**
- **3.1 行走轴-利用模型库**
用户可以通过模型库来设置机器人的行走轴。
- **3.2 行走轴-自建数模**
对于特殊需求,用户可以创建自己的数模来定义行走轴。
4. **第四章 变位机协调功能**
- **4.1 单轴变位机协调功能设置**
本章节详述了如何设置和运用单轴变位机的协调功能。
- **4.2 单轴变位机协调功能示例**
提供实际操作示例,帮助用户理解并掌握协调功能的应用。
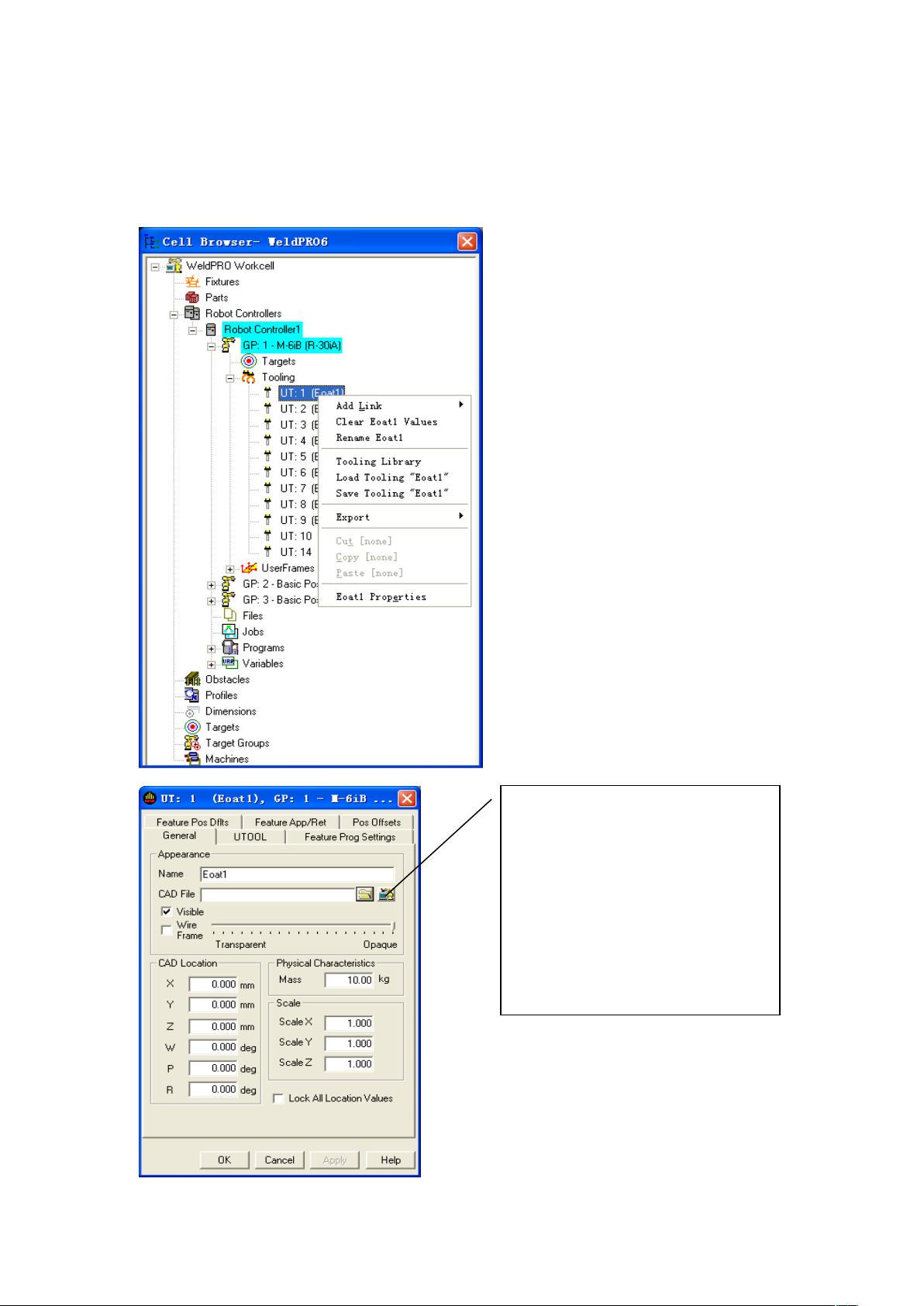
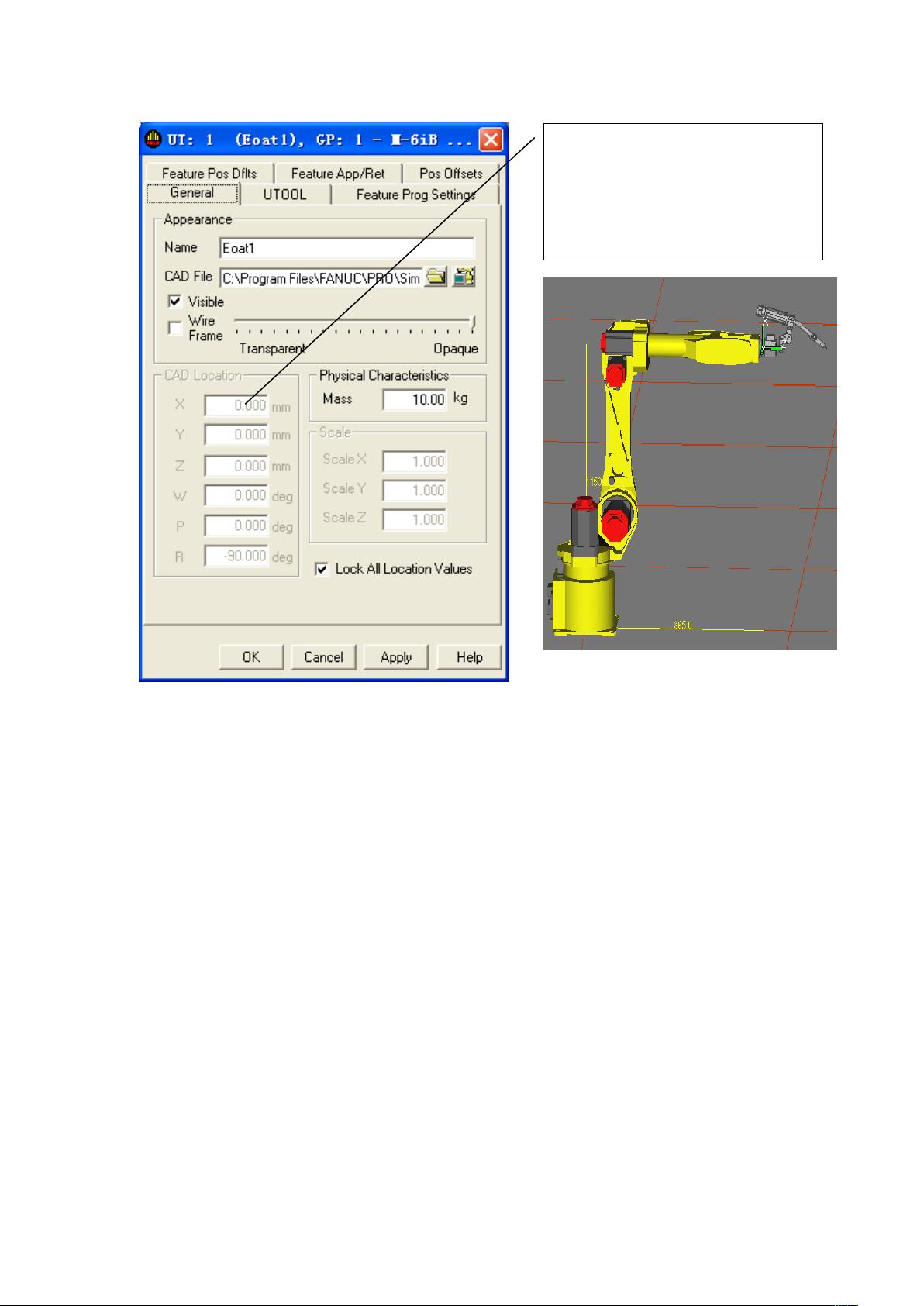
5. **第五章 添加其他外围设备**
这一部分指导用户如何在仿真环境中添加和配置不同的辅助设备,以实现更复杂的机器人系统集成。
6. **第六章 仿真录像的制作**
用户可以学习如何记录和制作仿真过程的录像,以便回放分析或展示。
整体来看,这份手册是FANUC机器人仿真软件全面的操作指南,涵盖了从基础设置到高级功能的全方位介绍,对于学习和掌握FANUC机器人仿真系统非常有帮助。通过学习和实践,用户可以有效地规划、设计和测试机器人工作单元,优化机器人作业流程,并提升自动化生产线的效率和安全性。
2022-06-07 上传
2022-06-06 上传
2021-09-17 上传
2022-06-16 上传
2022-05-17 上传
2024-04-04 上传
2021-01-28 上传

omyligaga
- 粉丝: 93
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 笔试有了他你就可以过了
- MPEG 基础和协议分析指南
- Drools4.0用户手册
- 一种基于改进型CORDIC算法的数控振荡器
- 模拟电子98问WORD文档
- ArcGIS Server 9.3 创建和发布Service&Web Application
- TCP/IP Sockets in Java
- rfc2616/HTTP/1.1中文版
- Labview中串口通讯的研究
- Ubuntu手把手教你学(全图文教程)
- C的十万个为什么 c语言应用中的常见问题及其解答
- CentOS,radhat下安装Oracle10g
- Expert One-on-One Oracle(英文版)
- 华3EOC技术白皮书
- C++ Language Tutorial(英文版)
- LINUX命令汇总大全
