TM1621 LCD驱动器规格说明书
需积分: 50 198 浏览量
更新于2024-07-16
收藏 1.08MB PDF 举报
"TM1621_V1.4.pdf 是一份中文版的TM1621 LCD驱动器规格书,详细介绍了该驱动器的功能、特性以及引脚配置。"
TM1621是一款内存映象型LCD驱动器,设计灵活,适用于多种LCD应用,如LCD模块和显示子系统。其主要特点包括:
1. 工作电压范围广泛,支持2.4V到5.2V。
2. 内置256KHz RC振荡器,也可外接32KHz晶体或256KHz频率源,提供了灵活性。
3. 提供1/2或1/3偏压选项,以及1/2、1/3或1/4的占空比选择,适应不同LCD面板的需求。
4. 具有内置的时基频率源,可以控制蜂鸣器频率,并且具有节电模式以降低系统功耗。
5. 集成了时基发生器和看门狗定时器(WDT),并有溢出输出功能,增强了系统稳定性。
6. 设有8个时基/看门狗定时器时钟源,提高了定时管理的灵活性。
7. 驱动能力为32x4的LCD,内建32x4位的显示RAM,用于存储显示数据。
8. 采用四线串行接口进行通信,简化了与主控制器的连接。
9. 内置LCD驱动频率源,确保了驱动LCD的精确性。
10. 软件配置特性丰富,包括数据模式、命令模式指令和三种数据访问模式。
11. 通过VLCD引脚可以调节LCD的工作电压,以适应不同的面板需求。
12. 封装形式多样,包括SSOP48和LQFP44。
TM1621的引脚配置如下:
- VSS和VDD分别代表电源的地线和正极。
- CS是片选信号线,用于选择TM1621。
- WR和/RD分别是写入和读取信号线,用于串行通信。
- DATA是数据线,传输命令和数据。
- BZ和/BZ是声音输出,可以产生两种频率的蜂鸣声。
- /IRQ是时基或WDT溢出输出,提供中断功能。
- COM0~COM3和SEG0~SEG31是LCD的公共端和段控制端,用于驱动LCD显示。
此外,TM1621的封装图展示了其顶部视图,清楚地标明了各引脚的位置和功能,便于在电路设计中进行参考。
TM1621是一款功能强大且灵活的LCD驱动器,适用于需要高效能、低功耗显示解决方案的嵌入式系统。
LCD 驱动器 TM1621
4
©Titan Micro Electronics www.titanmec.com
V1.4
BZ、/BZ
音频输出
19/20
7/8
声音频率输出
COM0
~COM
3
共用端输
出端口
21~24
9~12
LCD 共用端(common)驱动口
SEG0~S
EG31
段输出端
口
8~1/48~
25
44~13
LCD 段(segment)驱动口
极限最大额定值
供应电压: -0.3V~0.5V 贮存温度:-50~125度
输入电压: VSS-0.3V~VDD+0.3V 工作温度:-25~75度
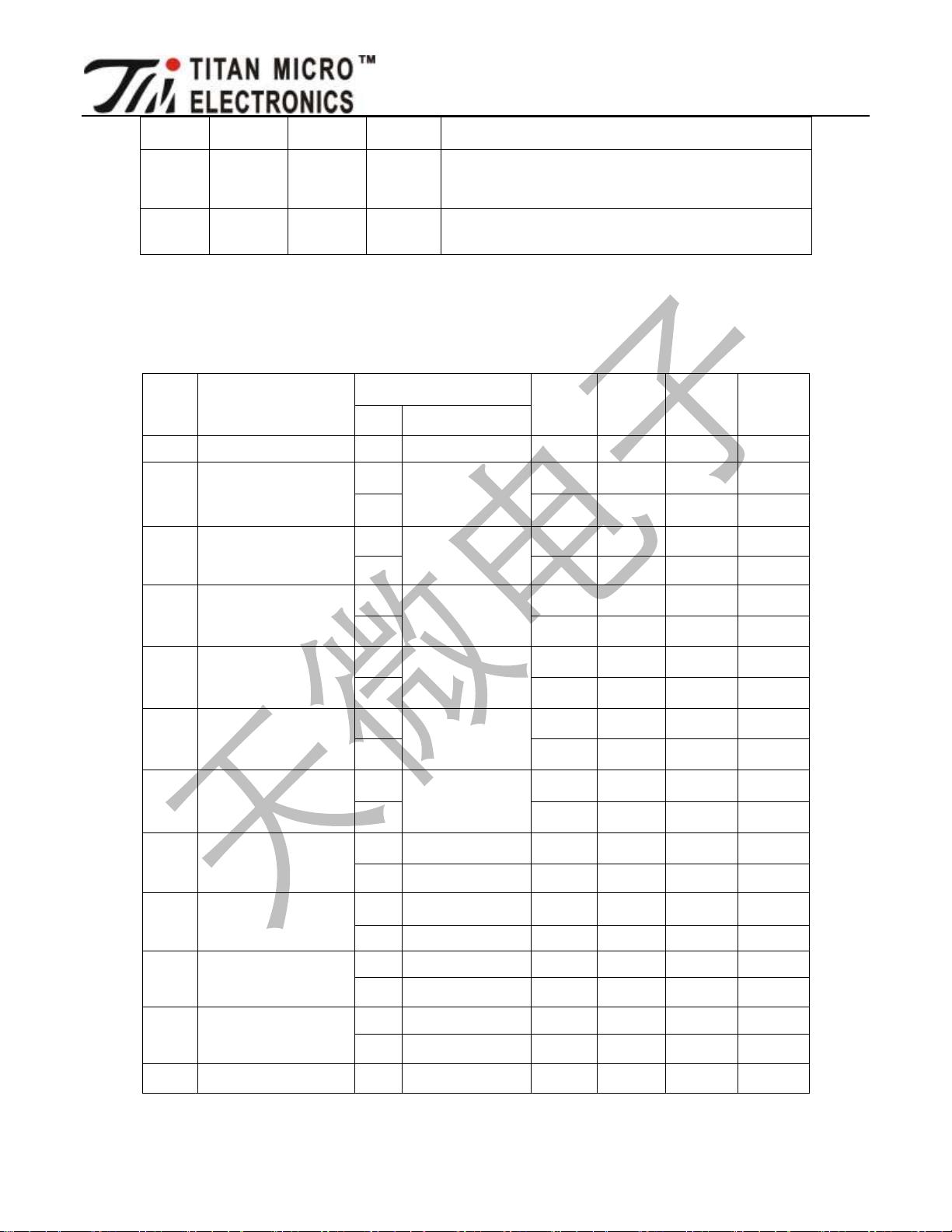
直流电气参数
符号
描述
测试条件
最小值
典型值
最大值
单位
VDD
条 件
VDD
工作电压
2.4
5.2
V
IDD
工作电流
3V
不带负载
片内RC振荡器
150
300
uA
5V
300
600
uA
IDD
工作电流
3V
不带负载晶振
60
120
uA
5V
120
240
uA
IDD
工作电流
3V
不带负载
外部时钟源
100
200
uA
5V
200
400
uA
ISTB
待机电流
3V
不带负载
省电模式
0.1
5
uA
5V
0.3
10
uA
VIL
输入低电平电压
3V
DATA,/WR,
/CS,/RD
0
0.6
V
5V
0
1.0
V
VIH
输入高电平电压
3V
DATA,/WR,
/CS,/RD
2.4
3.0
V
5V
4.0
5.0
V
IOL1
DATA,BZ,/BZ,/IRQ
3V
VOL=0.3V
0.5
1.2
mA
5V
VOL=0.5V
1.3
2.6
mA
IOH1
DATA,BZ, /BZ
3V
VOH=2.7V
-0.4
-0.8
mA
5V
VOH =4.5V
-0.9
-1.8
mA
IOL2
LCD 公共口漏电流
3V
VOL=0.3V
80
150
uA
5V
VOL=0.5V
150
250
uA
IOH2
LCD 公共口源电流
3V
VOH=2.7V
-80
-120
uA
5V
VOH=4.5V
-120
-200
uA
IOL3
LCD 段管脚漏电流
3V
VOL=0.3V
60
120
uA
剩余16页未读,继续阅读
2019-04-18 上传
2012-04-25 上传
2019-07-01 上传
2021-09-30 上传
2021-10-05 上传
2011-12-05 上传
2022-03-04 上传

静静流淌的柯溪
- 粉丝: 213
- 资源: 35
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
