全伺服驱动平面五杆并联机器人控制系统设计
需积分: 35 112 浏览量
更新于2024-08-13
1
收藏 224KB PDF 举报
"本文详细介绍了平面五杆并联机器人控制系统的设计,包括硬件结构和软件系统的选择。平面五杆并联机器人因其结构特点,如高刚度、稳定性强、精度高和占用空间小,近年来受到广泛关注。文章特别强调了全伺服驱动在提升机器人柔性和应用潜力上的优势,与混合驱动相比,全伺服驱动能够更精确地执行定时轨迹,从而提高工作效率和质量。"
本文是一篇自然科学领域的论文,探讨了平面五杆并联机器人控制系统的构建。作者们指出,这种类型的机器人由两台伺服电机驱动,赋予其两个自由度,使其在多个领域中有广泛的应用潜力。控制系统采用PC机作为上位机,配备MC206X运动控制器作为下位机,软件方面则采用基于Windows操作系统的Motion Perfect2,确保了控制的精确性和实时性。
平面五杆并联机器人作为平面并联机构的一种,具有结构简单、易于实施的特点。与平面二自由度和三自由度机构相比,五杆机构能够提供更多的设计选择。尽管混合驱动在某些情况下也有其应用,但全伺服驱动的五杆机构在执行复杂轨迹时表现更优,且对工作质量和效率有显著提升。因此,深入研究全伺服驱动的平面五杆并联机器人系统具有重要的实际意义。
文章还简述了平面五杆并联机器人的机械结构,包括四个活动构件和末端操作手爪,展示了其基本构成。此外,该研究得到了北京市自然科学基金的资助,体现了学术界对此类课题的关注和支持。
平面五杆并联机器人控制系统设计是一项旨在提升机器人性能和应用范围的重要研究,其全伺服驱动方案对于提高工作精度和灵活性具有显著作用,对于推动并联机器人技术的发展具有积极的贡献。
第
27
卷第
1
期
2009
年
1
月
北京工商大学学报(自然科学版)
Vo
1.
27
No.1
Journal of Beijing Technology and Business University( Natural Science Edition)
Jan.
2009
21
文章编号
:1671-1513(2009)01-0021-04
平面五杆并联机器人控制系统设计
赵东洋,
辛洪兵,
陈美钮,
李颖,
林立
(北京工商大学机械工程学院,北京
100048)
摘
要:介绍丁平面五杆并联机器人控制率统设计,控制系统采用
PC
机为土住机、
MC206X
运动
控制器为下住机的硬件结构和基于
Windows
操作率统的
Motion
Perfect2
的软件系统.此控制系
统由两个伺服电机驱动五杆机构,使平面五杆并联机器人具有更大的呆性和应用潜刀.
关键词:并联机器人;控制率统;设计
中图分类号:
TP242.6
文献标识码
:A
并联机器人与串联机器人相比,具有刚度大、结
构稳定、精度高以及空间小等特点,近年来在机器人
领域中引起了广泛的重视
[1]
平面并联机构是一种
典型的并联机构,利用它可以综合出许多性能优良
的机构,同时它也是研究空间并联机构的基础.最
具代表性的平面并联机构是平面二自由度机构和平
面三自由度机构.平面五杆并联机构有两个自由
度,是单闭环机构,具有结构简单、便于应用的特点,
在很多领域中得到应用,它不仅可以作为并联机器
人单独使用,而且还可以与其他机构一起组成惺联
机构,因此该机构得到了国内外学者的重视.
平面五杆并联机器人是较简单的平面并联机器
人,在控制系统设计中采用两个伺服电机驱动主动
关节,与
1
昆合驱动五杆机构相比,全伺服驱动五杆机
掏具有更大的柔性和应用潜力
[2]
全伺服驱动五杆
机构可以精确实现工作空间内任意给定的计时轨
迹,而混合驱动五杆机构只能精确实现给定的非计
时轨迹,这限制了工作效率和工作质量,因此也限制
了?昆合驱动五杆机构的工程应用范围.因此全伺服
平面五杆并联机器人的系统研究是必要的.
1
平面五杆并联机器人的机械结构
[3]
平面五杆并联机器人机械结构主要由平面五杆
收稿日期:
2008
-10 -
16
基金项目:北京市自然科学基金资助项目
(3082005)
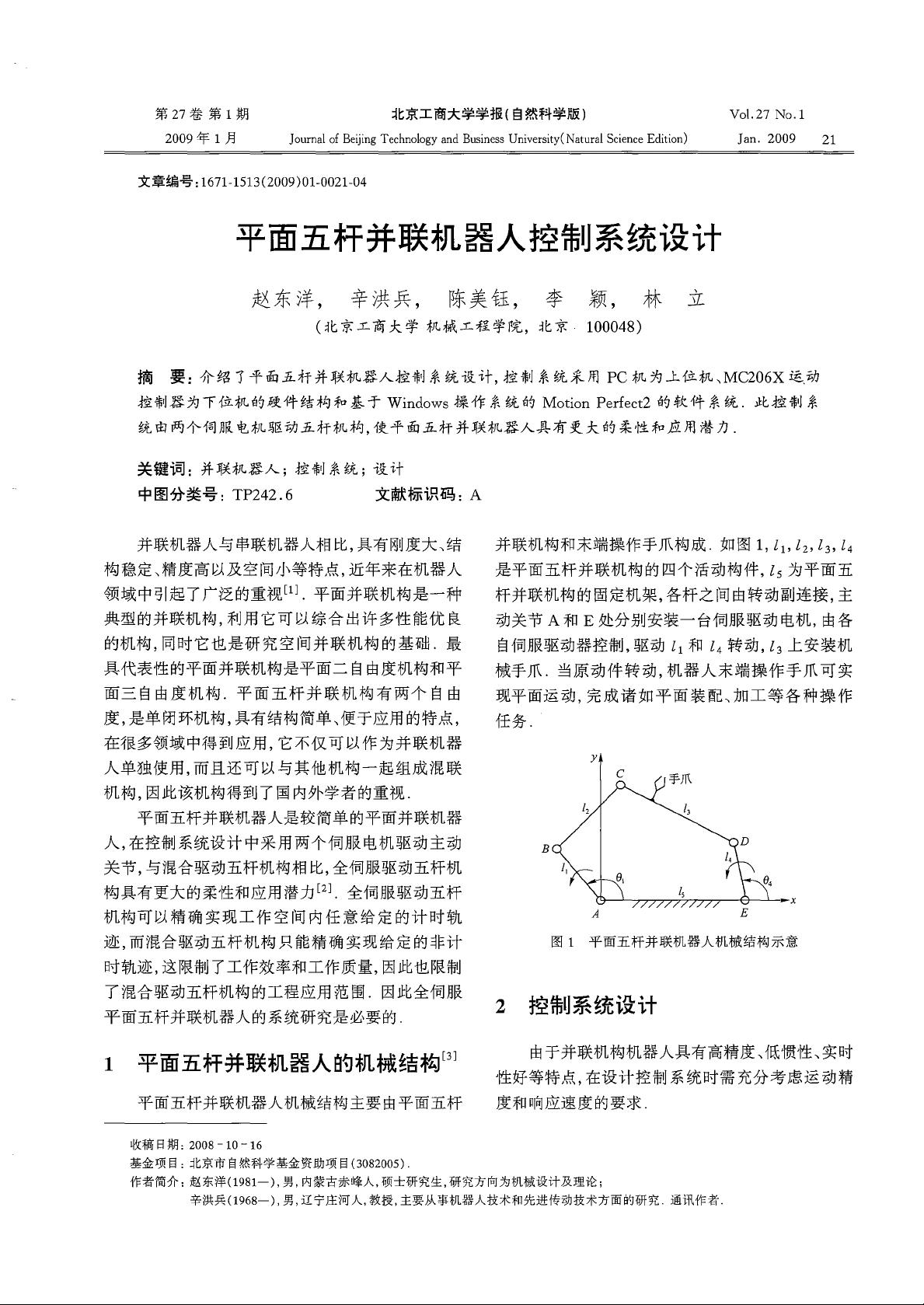
并联机构和末端操作手爪构成.如图
1
,
l1' l2'
l3'
l4
是平面五杆并联机构的四个活动构件
,
l5
为平面五
杆并联机构的固定机架,各杆之间由转动副连接,主
动关节
A
和
E
处分别安装一台伺服驱动电机,由各
自伺服驱动器控制,驱动
l1
和
l4
转动
,
l3
上安装机
械手爪.当原动件转动,机器人末端操作手爪可实
现平面运动,完成诸如平面装配、加工等各种操作
任务.
y
B
x
A
E
图
1
平面五杆并联机器人机械结构示意
2
控制系统设计
由于并联机构机器人具有高精度、低惯性、实时
性好等特点,在设计控制系统时需充分考虑运动精
度和响应速度的要求.
作者简介:赵东洋
(1981
一)
,男,内蒙古赤峰人,硕士研究生,研究方向为机械设计及理论,
辛洪兵(1
968
一),男,辽宁庄河人,教授,主要从事机器人技术和先进传动技术方面的研究通讯作者.
下载后可阅读完整内容,剩余3页未读,立即下载
2021-08-14 上传
2021-08-14 上传
2022-06-30 上传
2021-10-11 上传
2021-04-16 上传
2021-05-30 上传
2024-10-09 上传

weixin_38618094
- 粉丝: 4
- 资源: 912
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
