PIC微控制器驱动直流伺服电机设计及源码
需积分: 10 72 浏览量
更新于2024-07-27
3
收藏 260KB PDF 举报
"这篇文档是关于使用PIC18CXXX系列微控制器进行直流伺服电机设计的教程,包含源代码,适用于学习和参考。"
在本文档中,作者介绍了如何利用Microchip Technology Inc.的PICmicro®微控制器,特别是PIC18CXXX和PIC16CXXX系列芯片来设计直流伺服电机系统。直流伺服电机广泛应用于需要精确位置控制和速度控制的领域,如机器人、自动化设备和精密定位等。
文档的初步介绍指出,PICmicro家族提供了多种器件和选项供嵌入式设计者选择,其中PIC16CXXX和PIC18CXXX家族的引脚兼容性使得在同一硬件设计中可以灵活选用不同器件,为设计者提供了平滑的升级路径。文中具体以PIC18C452和PIC16F877为例,探讨了这些微控制器在伺服电机应用中的资源需求。
在直流伺服电机的应用中,PICmicro MCUs执行的关键任务包括:
1. **用户控制接口**:允许用户通过各种输入(如按钮、旋钮或传感器)设定电机的动作指令。
2. **电机位置测量**:通过霍尔效应传感器、编码器或其他位置检测装置来实时监测电机的位置,确保准确控制。
3. **运动轮廓计算**:根据用户输入或预设的运动轨迹,计算电机应遵循的速度和位置变化。
4. **误差信号计算与PID控制**:微控制器会计算实际位置与目标位置之间的误差,并通过比例积分(PI)控制器来调整电机的控制信号,以减小误差并达到期望的性能。
通过理解这些基本功能,读者可以根据提供的设计基础,结合具体的项目需求,选择合适的PICmicro器件来定制自己的直流伺服电机控制系统。源代码的提供有助于读者深入理解控制逻辑和实现细节,加快学习和开发进程。
这份资料对于想要学习和实践微控制器驱动直流伺服电机控制技术的人来说是一份宝贵的资源,不仅提供了理论知识,还包含了实际操作的源代码,能够帮助开发者快速掌握相关技能。
2000 Microchip Technology Inc. Preliminary DS00696A-page 9
AN696
that you wish to change the acceleration value for seg-
ment 2 to 1000. To do this, you would send the follow-
ing ASCII string to the servomotor:
A,2,1000 <CR>
This syntax can be used to change all motion profile
segment parameters.
After all motion profile data has been entered, a single
motion profile segment, or range of segments, may be
executed using the ’G’ or ’L’ command. To execute seg-
ments 1 through 4, for example, you would send the fol-
lowing ASCII string to the servomotor:
G,1,4 <CR>
If you only want to run one motion segment, the desired
segment number is entered twice as shown:
G,1,1 <CR>
The ’L’ command is used the same way as the ’G’ com-
mand, except that the range of motion segments is
executed repeatedly. This command is useful for creat-
ing repetitive motions with the servomotor. The ’S’ com-
mand stops the motion profile after the presently
executing motion segment has completed.
Three commands are available to change the PID gain
constants. With these commands, you can manually
tune the PID algorithm to obtain the best performance
from the motor in your application.
The ’W’ command turns the motor driver IC on or off.
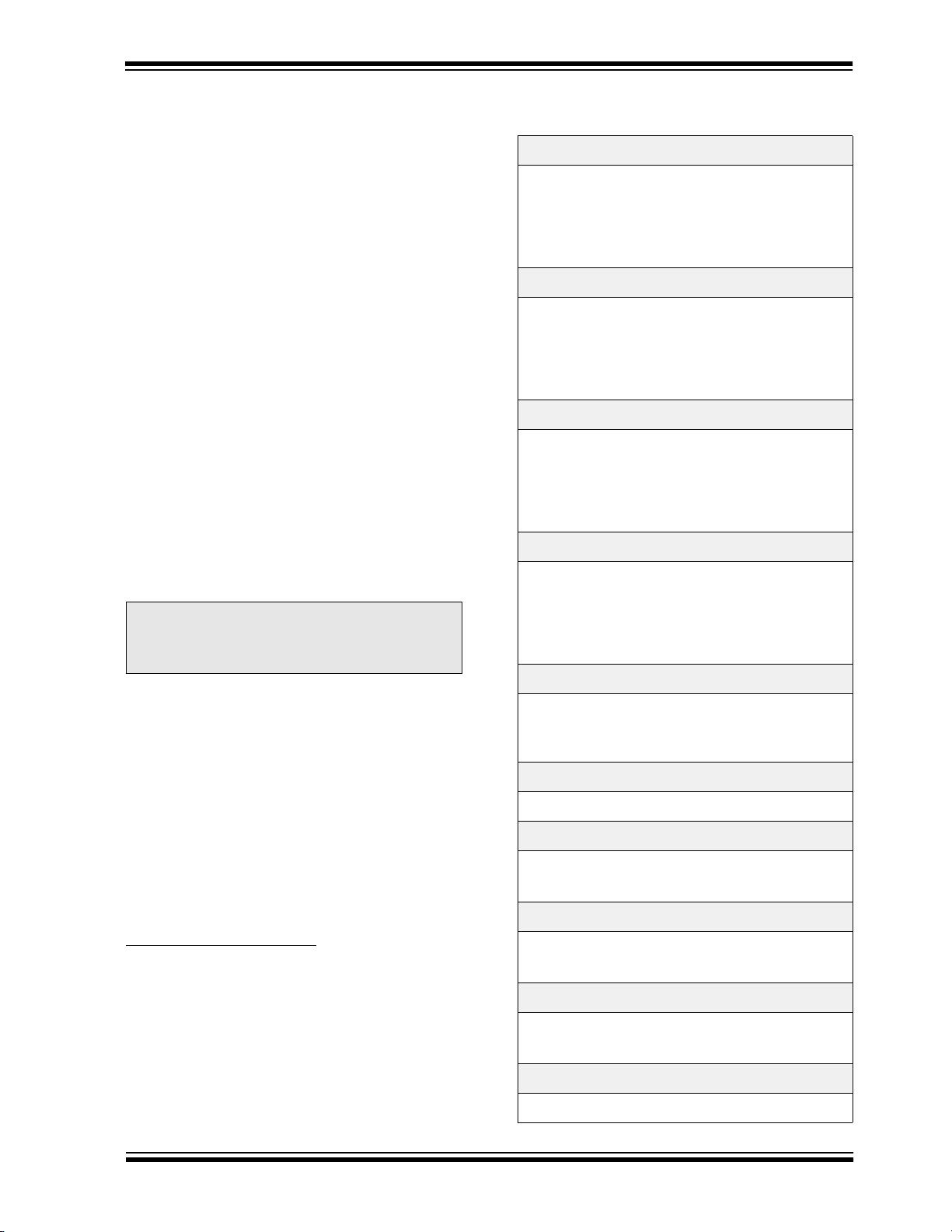
A summary of all servomotor commands and their syn-
tax is given in Table 1.
Two status flags, stat.run and stat.loop, are
used to control execution of the motion profile. If a ’G’
command is entered to run a series of motion seg-
ments, the stat.run flag is set. If a ’L’ command is
entered, the stat.run and the stat.loop flags are
set. When the SetupMove() function determines that
the last segment in the motion profile has executed, the
stat.loop flag is checked. If stat.loop is set, the
motion profile segment data for the first segment in the
sequence is loaded and execution continues. If
stat.loop is clear, then the stat.run flag is cleared
and motion stops.
Operation With ASCII Terminal
You can use a PC terminal program, such as
PROCOMM
®
or HyperTerminal
®
, to control the servo-
motor. The terminal program should be configured for
19.2 kBaud, no parity, 8 data bits, and 1 stop bit. When
the servomotor is reset, you will see an introduction
message and a ’READY>’ prompt. You should now be
able to enter any of the commands shown in Table 1.
TABLE 1: SERVOMOTOR COMMAND
SUMMARY
Note: You may find the ‘W’ command to be
extremely useful if the PID gain constants
you've chosen cause the servomotor to
become unstable.
Command: X,seg#,data <CR>
Sets the distance to be travelled for the specified
motion profile segment. Data is provided in encoder
counts relative to the present position.
0 ≤ seg# ≤ 23
-32768 ≤ data ≤ 32767
Command: A,seg#,data <CR>
Sets the acceleration for the specified motion profile
segment. Data is provided in encoder
counts/T
SERVO
2
/65536.
0 ≤ seg# ≤ 23
1 ≤ data ≤ 32767
Command: V,seg#,data <CR>
Sets the velocity limit for the specified motion profile
segment. Data is provided in encoder
counts/T
SERVO
/256.
0 ≤ seg# ≤ 23
1 ≤ data ≤ 32767
Command: T,seg#,data <CR>
Specifies the amount of time to wait before executing
the next motion profile segment. Data is provided in
T
SERVO
multiples.
0 ≤ seg# ≤ 23
0 ≤ data ≤ 32767
Command: G,startseg,stopseg <CR>
Executes a range of motion profile segments.
0 ≤ startseg ≤ 23
0 ≤ stopseg ≤ 23
Command: S <CR>
Stops execution of a motion profile.
Command: P,data <CR>
Changes the proportional gain for the PID algorithm.
-32768 ≤ data ≤ 32767
Command: I,data <CR>
Changes the integral gain for the PID algorithm.
-32768 ≤ data ≤ 32767
Command: D,data <CR>
Changes the differential gain for the PID algorithm.
-32768 ≤ data ≤ 32767
Command: W <CR>
Enables or disables the PWM driver stage.
剩余48页未读,继续阅读
2012-09-06 上传
2008-11-16 上传
2011-05-20 上传
102 浏览量
2010-09-24 上传

电子爱好者.
- 粉丝: 32
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- MapV2WithActionBarSherlock:这是为了演示Google Map v2的常用功能,例如绘图,与我的位置绑定,动画,屏幕上的xy坐标与latlog之间的映射
- 适合手机界面显示的幻灯片左右切换代码.zip
- Scratch少儿编程项目音效音乐素材-【日常生活】音效-棋子落下音效5个.zip
- gps_siggen.zip_GPS编程_matlab_
- sanity-next-portfolio
- xiami:从xiami.com检索歌曲
- 西门子1200温度采集_西门子1200程序_西门子1200温度采集程序_西门子1200_
- VITauth-Backend:用于 VIT 考试认证系统的 Express.js 后端
- jsp+servlet+EL(MVC项目)酒店预约完整项目
- SortListViewDemo:仿小米联系人字母排序,右侧字母选择条
- latticelm-0.3.rar_语音合成_Visual_C++_
- LaravelProjectDSI22
- 适合商家网站抽奖宣传的js刮刮卡特效代码.zip
- Test_QQMainView:通过 OC 实现“手机QQ” 主页面的侧滑菜单、视图联动
- Scratch少儿编程项目音效音乐素材-【铃声】音效-诺基亚经典短信滴滴滴滴等2个mp3.zip
- 串口舵机_lobotserialservo_舵机/串口舵机_
