STM32多功能小车:循迹、蓝牙与无线摇杆操控实战
版权申诉
126 浏览量
更新于2024-06-27
收藏 704KB DOCX 举报
本文档主要介绍了基于STM32F103的多功能小车的设计与实现,这款小车集成了多种先进的功能,旨在通过实践学习如何充分利用STM32这一高性能、低成本、低功耗的嵌入式微控制器。STM32系列的Cortex-M3内核为项目提供了强大的处理能力。
设计任务与要求方面,小车需具备以下功能:
1. 寻迹功能:能够稳定地跟踪单黑线路径,确保车辆在赛道上运行,避免冲出跑道。
2. 红外遥控功能:允许通过红外遥控器控制小车的移动,包括前后左右转向,支持连续按键操作。
3. 蓝牙遥控功能:作为从设备,通过蓝牙连接智能手机作为主设备,实现远程控制。
4. NRF2401无线遥控控制:扩展了遥控控制方式,增强灵活性。
核心模块设计包括:
- 循迹模块:利用L298N驱动电路实现电机控制,以实现小车的路径追踪。
- 驱动模块:采用L298N驱动电机,支持双电机的高效控制。
- 稳压模块:为电路提供稳定的+5V和+7.8V电压,保障系统稳定性。
- 蓝牙模块:实现与手机的蓝牙通信,实现远程和角度精确的操控。
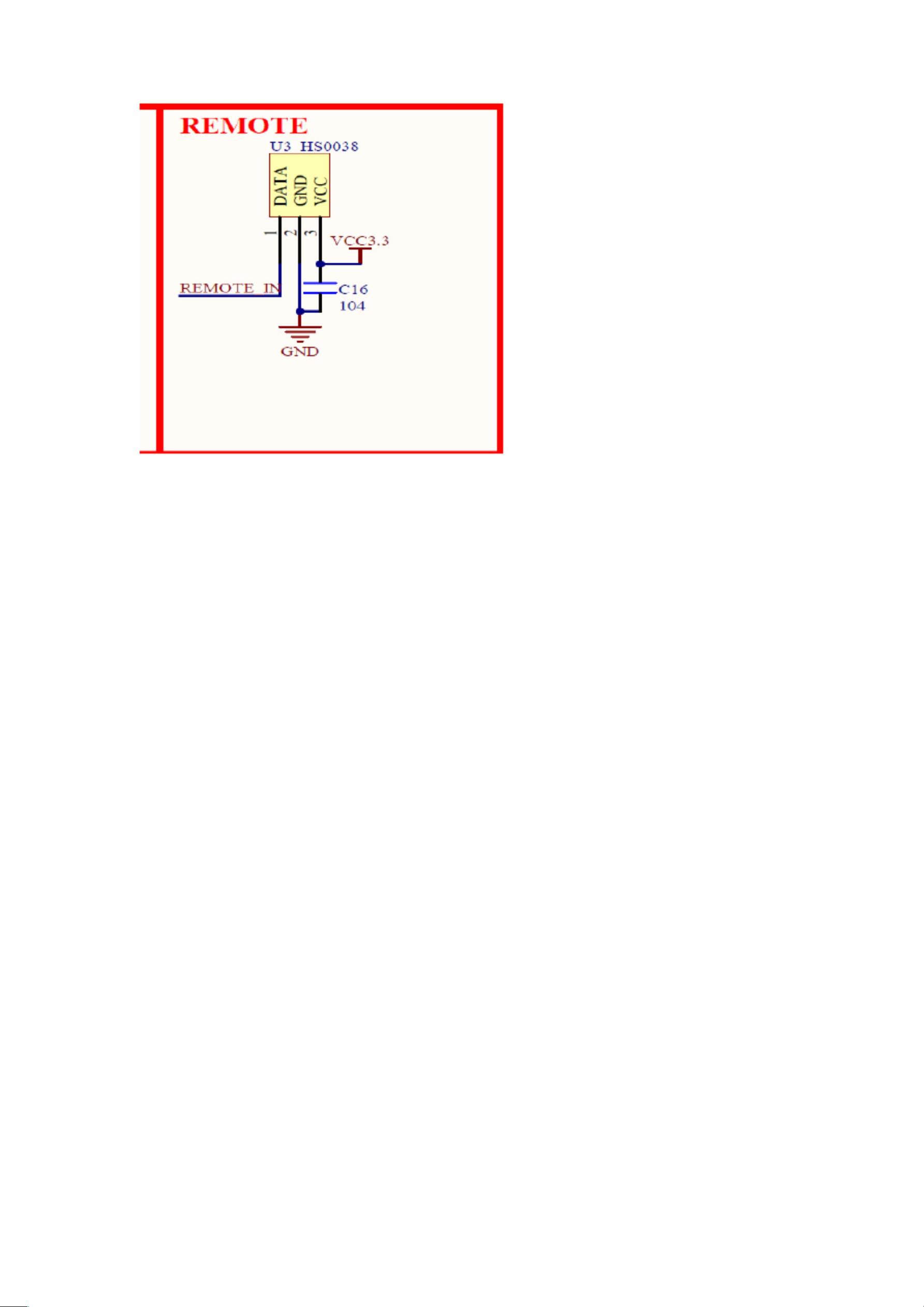
- 红外接收模块:接收红外信号,用于红外遥控功能。
- 摇杆遥控器原理图:展示了无线遥控器的设计,左摇杆负责方向控制,右摇杆控制速度。
在测试阶段,作者记录了以下结果:
- 红外遥控模式:功能正常,支持前进、后退、左右转向,但对较大弯度的适应性需进一步优化。
- 循迹模式:小车能遵循简单赛道,速度可调,但在复杂弯道时效果欠佳,需要调整参数。
- 蓝牙模式:通过蓝牙控制小车,控制距离远,视角广,操控稳定。
- 无线遥控模式:利用自制遥控器进行控制,方向控制精准,但电机限制导致速度控制不如蓝牙理想。
通过这个项目,学习者不仅掌握了STM32的基本功能如IO输入输出、时钟配置、定时器使用、串口、ADC和SPI等,还锻炼了实际硬件设计和编程能力,体验了多模态交互系统的集成与调试。整个过程对于提高嵌入式系统的理解和应用有着重要意义。
6
剩余34页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-01 上传
2023-09-30 上传
2022-06-02 上传
2023-10-07 上传
2022-06-11 上传
2022-11-19 上传

xxpr_ybgg
- 粉丝: 6796
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elmag-开源
- Customer-Revenue-Prediction
- Scratch少儿编程项目音效音乐素材-【风】相关音效-诡异的风.zip
- 火箭服务器
- robot,c语言吃豆子源码,c语言项目
- aircnc-react:一个漂亮而简单的应用程序,适用于开发公司景点
- sc-fermi-开源
- 陀螺仪和加速度计的卡尔曼MATLAB仿真.rar
- naviworks
- SF-DST10-RDS4
- Tic-Tac-Toe---Player-againts-Computer---Java-Swing
- my-vocab
- Scratch少儿编程项目音效音乐素材-【打斗】音效-打群架.zip
- 暴雪:转到暴雪API数据的客户端库
- ADIS16255Driver,c语言库源码大全,c语言项目
- DSAPCS1092:这是CYCU的DS课程
