高精度三维猫眼视觉传感器:全方位点矩阵投影技术
173 浏览量
更新于2024-08-27
收藏 1.25MB PDF 举报
"Three-dimensional catadioptric vision sensor using omnidirectional dot matrix projection"
这篇研究论文介绍了一种创新的三维猫adioptric视觉传感器,该传感器采用了名为全方位点矩阵投影(ODMP)的技术,旨在解决由不均匀成像分辨率导致的测量精度低的问题。在传统的光学系统中,不同区域的成像质量可能会有显著差异,这可能导致三维测量的不准确。ODMP技术通过使用20到100个激光器组成的环形阵列来解决这个问题,这种布局能够确保整个成像区域具有高分辨率。
猫adioptric视觉传感器是一种结合反射和折射的光学系统,通常包括一个或多个反射镜和透镜,用于捕获和处理物体的三维信息。在这种新型传感器中,ODMP的设计优化了图像采集过程,使得细节信息的损失最小化。通过调整投影密度,即改变激光点阵的分布密度,可以适应不同的场景和测量需求,从而提高测量的精确度和效率。
文章中提到,对传感器性能的实验证明,设计的传感器在测量任务中表现出高效和高精度。实验可能包括对不同物体和场景的三维重建,以验证其在实际应用中的性能。由于这种传感器能够在较大区域内保持高分辨率,因此它特别适合于需要高精度测量的应用,例如机器人导航、工业检测、自动驾驶汽车的环境感知,以及虚拟现实和增强现实等技术。
此外,由于使用了激光作为光源,该传感器还可能具有快速响应和抗干扰能力强的特点。激光光源可以提供稳定的光束,提高测量的稳定性和可靠性。同时,激光的指向性使投影更精确,有助于提高空间定位的准确性。
总结来说,"Three-dimensional catadioptric vision sensor using omnidirectional dot matrix projection"这项研究为三维视觉传感技术带来了一项改进,通过ODMP技术提高了测量精度和效率,尤其是在需要高分辨率和细节信息的场景下。这一发展对于依赖精准三维测量的多个领域具有重要意义,为未来的自动化和智能化系统提供了更强大的工具。
Three-dimensional catadioptric vision sensor using
omnidirectional dot matrix projection
Fuqiang Zhou (周富强)
1,
*, Xin Chen (陈 昕)
1
, Haishu Tan (谭海曙)
2
,
and Xinghua Chai (柴兴华)
1
1
Key Laboratory of Precision Opto-mechatronics Technology, Ministry of Education,
Beihang University, Beijing 100191, China
2
Department of Electronic Information Engineering, Foshan University, Foshan 528000, China
*Corresponding author: zfq@buaa.edu.cn
Received July 1, 2016; accepted September 23, 2016; posted online November 10, 2016
In order to solve the problem of low measurement accuracy caused by uneven imaging resolutions, we develop a
three-dimensional catadioptric vision sensor using 20 to 100 lasers arranged in a circular array called omnidi-
rectional dot maxtric projection (ODMP). Based on the imaging characteristic of the sensor, the ODMP can
image the area with a high image resolution. The proposed sensor with ODMP can minimize the loss of the detail
information by adjusting the projection density. In evaluating the performance of the sensor, real experiments
show the designed sensor has high efficiency and high precision for the measurement of the inner surfaces of
pipelines.
OCIS codes: 140.3290, 140.3560, 150.0155, 280.3420.
doi: 10.3788/COL201614.111403.
In computer vision systems, omnidirectional three-
dimensional (3D) measurements are an attractive area that
can observe omnidirectional scenes simultaneously
[1,2]
. The
imaging model of catadioptric vision systems have been
studied in-depth in recent years. Geyer and Daniilidis
[3]
derived the geometric model of the catadioptric camera
system, which has been used by many research works in
the area of visual serving. Scaramuzza et al.
[4,5]
gave a
detail analysis of the catadioptric camera’s imaging
model with a conic reflector. Similarly, vision sensors
based on the catadioptric vision system also have
achieved remarkable results. Paniagua et al.
[6]
designed
a wearable catadioptric vision sensor with a low-cost
conic pattern laser in hand. Shin
[7]
proposed an omnidi-
rectional ranging system using a line structured light
image to obtain all directional distance information effec-
tively. Harmat
[8]
presented an omnidirectional structure
light sensor that could be applied to small, unmanned
aerial vehicles, which can operate in a number of differ-
ent environments. Zhang
[9]
used light rings with different
angular frequencies and intensities to build a catadioptric
vision system for robotic navigation. Catadioptric camera
systems based on structured light 3D vision measurements
have the widest applications
[10–13]
in practical inspections
due to their fast measuring speed, non-contact, low cost,
and robust nature in real measurements
[14–16]
. However,
although the working method and principle of the existing
catadioptric structured light vision sensors are similar, the
lasers used in the sensors are different, such as circular
structured light and line structured light
[17]
, whi ch may
cause the loss of detail information in a local, highly reflec-
tive pipeline. The measurement accuracy is influenced by
the uneven imaging resolution caused by the structure
characteristics of the reflector and the projection density
of the lasers.
To solve these problems, we present a 3D catadio ptric
vision sensor that can be applied to the measurement of
a long pipeline. The omnidirectional dot maxtric projection
(ODMP), which consists of 20 to 100 dot lasers and is posi-
tioned in 2 to 5 layers between the mirror and camera by
10° to 50°, can image a high imaging resolution area. The
density of the ODMP can be adjusted using the measure-
ment accuracy. In the following section, we describe how we
can realize the measurement model by using the ODMP.
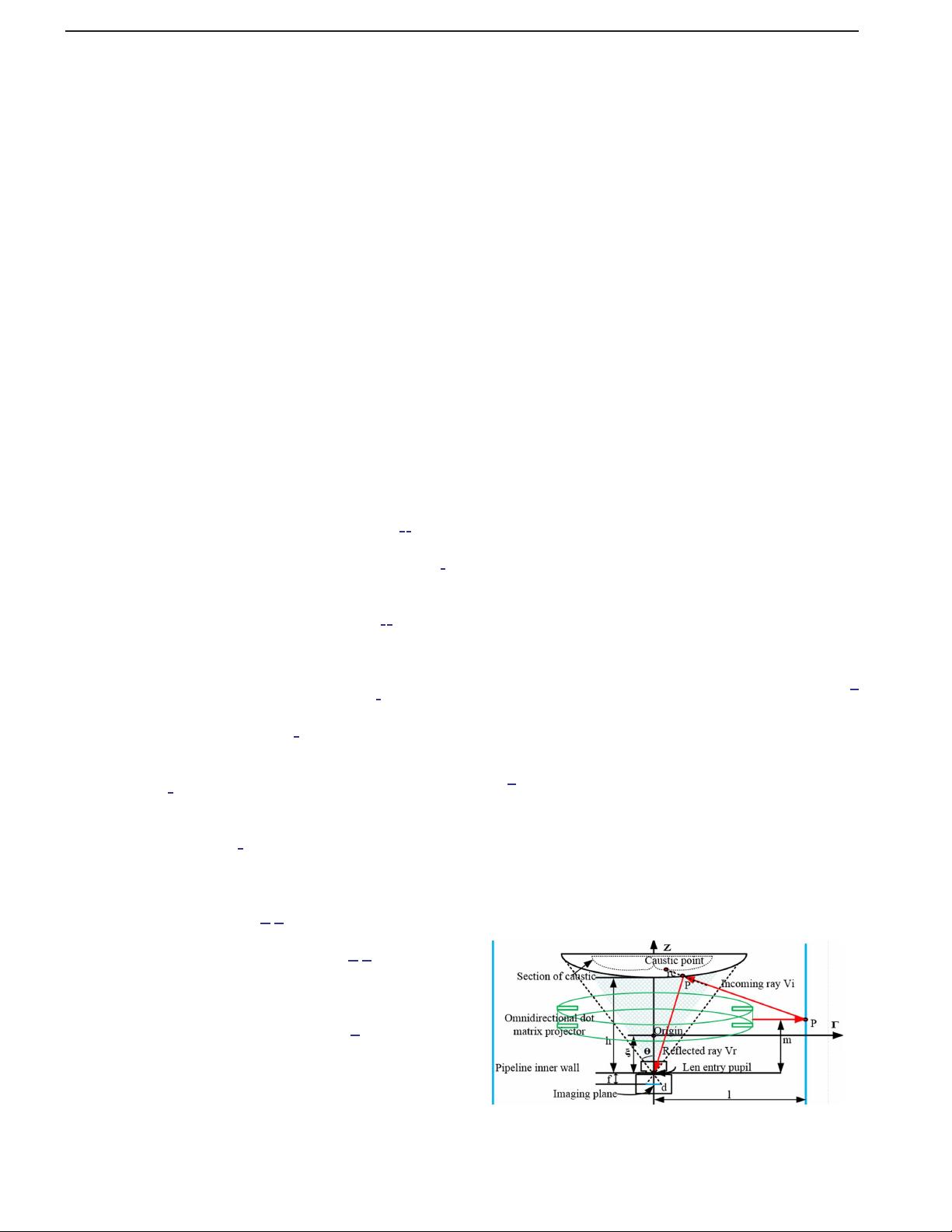
To measure the detail information of the inner surface,
we first established the structure of the sensor. Figure
1
shows the optical path designation of the ODMP sensor.
The camera placed below the conic reflector and the cam-
era optical axis coincide with the symmetry axis of the
conic reflector in the vertical direction. As is shown in
Fig.
1, there are some identifiers that need introducing:
the entrance pupil of the lens is located at ξ unite above
the origin. h is the distance between the optical center
of the camera and the vertex of the conic reflector. The
working height of the ODMP is m. The working distance
of the novel sensor is set as the mi nimum distance from the
light spots in the omnidirectional image to the camera
optical axis, which is defined as l.
Fig. 1. Structure design of ODMP sensor.
COL 14(11), 111403(2016) CHINESE OPTICS LETTERS November 10, 2016
1671-7694/2016/111403(5) 111403-1 © 2016 Chinese Optics Letters
下载后可阅读完整内容,剩余4页未读,立即下载
2020-12-09 上传
2021-08-14 上传
2024-09-19 上传

weixin_38741996
- 粉丝: 45
- 资源: 932
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入理解23种设计模式
- 制作与调试:声控开关电路详解
- 腾讯2008年软件开发笔试题解析
- WebService开发指南:从入门到精通
- 栈数据结构实现的密码设置算法
- 提升逻辑与英语能力:揭秘IBM笔试核心词汇及题型
- SOPC技术探索:理论与实践
- 计算图中节点介数中心性的函数
- 电子元器件详解:电阻、电容、电感与传感器
- MIT经典:统计自然语言处理基础
- CMD命令大全详解与实用指南
- 数据结构复习重点:逻辑结构与存储结构
- ACM算法必读书籍推荐:权威指南与实战解析
- Ubuntu命令行与终端:从Shell到rxvt-unicode
- 深入理解VC_MFC编程:窗口、类、消息处理与绘图
- AT89S52单片机实现的温湿度智能检测与控制系统
