PID控制器:原理、动态特性和应用
需积分: 50 119 浏览量
更新于2024-07-20
收藏 374KB PPT 举报
"PID调节原理"
PID(比例-积分-微分)控制是自动化领域中最基本且最常用的控制算法,它的核心在于通过结合比例、积分和微分三个元素来实现对系统的精确控制。这一控制策略的历史悠久,且因其简单易用和广泛适应性而在众多控制系统中占据主导地位。
在PID控制器中,比例部分(P)即时响应偏差,积分部分(I)负责消除静差,即随着时间累积误差,而微分部分(D)则预测未来的偏差趋势,从而提前进行调整。这种组合使得PID控制器能有效地减小误差并保持系统的稳定性。
在反馈控制系统中,PID控制器与被控对象形成闭环,确保系统能够根据设定值和实际输出之间的偏差进行自我调整。正反馈会导致系统失稳,而负反馈则能确保系统的稳定性和控制效果。当系统受到干扰或设定值改变时,系统会经历动态过程,即过渡过程,期间被调量会随时间变化以达到新的稳态。
评价控制系统性能的关键指标包括稳定性、准确性和快速性。稳定性确保系统在扰动后能够回到平衡状态;准确性关注系统能否将被调量精确地保持在设定值附近;而快速性则关乎系统响应速度,即从受扰动到恢复稳态所需的时间。
工业过程的动态特性通常包括以下几个方面:
1. 非振荡动态:工业对象的阶跃响应通常是平滑曲线,变化较慢。
2. 延迟效应:物料传递和信号处理等环节存在延迟,影响控制效果。
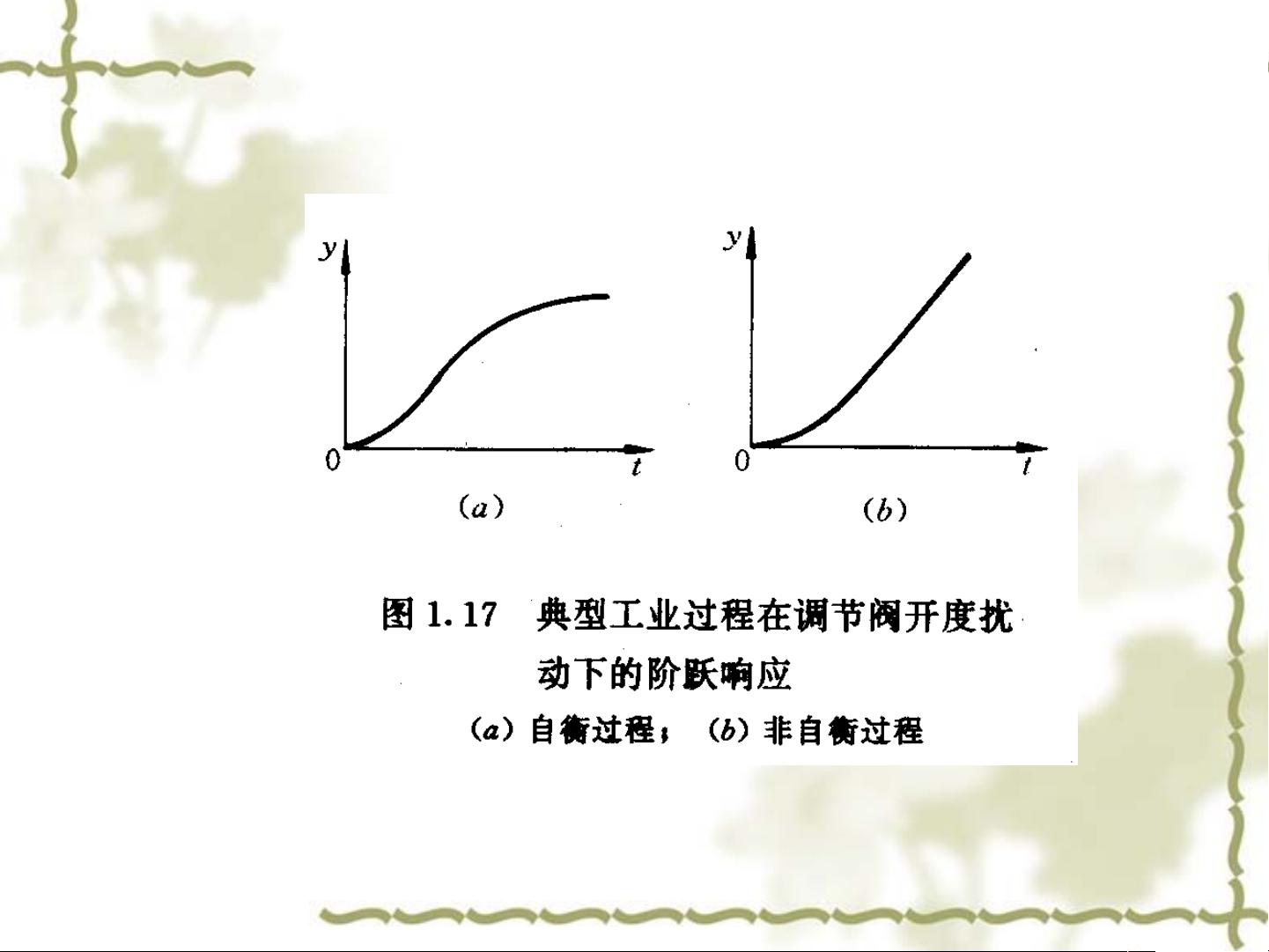
3. 自平衡能力:大多数工业对象在调节阀改变后能够自动恢复新的稳态,这取决于对象的静态增益K的自平衡率。
设计合理的PID控制系统时,工程师需要考虑这些动态特性,以满足工艺工程师提出的控制需求。在实际应用中,PID参数的整定(P、I、D的比例、积分和微分时间常数)是关键步骤,需要通过试验或经验方法找到最优设置,以实现最佳的控制性能。

3 .被控对象本身是稳定的
被控对象,当调节阀开度改变致使原来的物质或
能量平衡关系遭到破坏后,随着被调量的变化不
平衡量愈来愈小,因而被调量能够自动地稳定在
新的水平上。这种特性称为自平衡,具有这种特
性的被控对象称为自衡过程。
自平衡能力的大小用对象静态增益 K 的倒数衡量,
称为自平衡率,自平衡率
K
1

剩余63页未读,继续阅读
2014-02-27 上传
256 浏览量
2024-10-25 上传
327 浏览量
2024-11-26 上传
236 浏览量
2024-11-25 上传
221 浏览量

meng1989545454
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- SAP BC400 课程中文自学笔记
- 北京邮电大学模拟电子技术课件
- Multi 9系列C65系列小型断路器产品目录
- TASCAM MD350快速使用手册.doc
- PLSQL教程.doc
- WAP Push SP接口协议
- Linux Socket Programming by Example [Que 2000 No-Bookmark].pdf
- oracle sql优化100条
- LPC_CAN接受滤波器AFMR设置.pdf
- ARM7数据手册.pdf
- Informix 常见问题处理
- ARM常见疑难问题答疑
- 480中文使用说明书
- 计算机二级 c++(45套试题)
- Spring 开发指南
- Direct3D9初级教程
