水下无线传感器网络的集群安全同步协议
188 浏览量
更新于2024-08-27
收藏 943KB PDF 举报
"这篇研究论文探讨了一种基于簇的安全同步协议——CLUSS(CLUster-Based Secure Synchronization),用于水下无线传感器网络(Underwater Wireless Sensor Networks,UWSNs)。"
在水下无线传感器网络中,安全时间同步是关键问题之一。论文提出的新协议CLUSS,旨在确保网络节点间的时间同步过程既高效又安全。传统的同步方法可能面临诸如通信延迟、信号衰减以及潜在的网络安全威胁等问题。在水下环境中,这些问题尤为突出,因为水介质对无线信号的传播和接收具有更大的挑战。
CLUSS协议采用了分层的簇结构来优化网络资源的利用。这种结构允许节点以更小的通信开销实现局部同步,然后通过簇头节点(Cluster Head)进行整个簇的同步。簇头节点作为区域中心,负责收集子节点的时间信息,并计算出最佳同步策略。这种分布式的方法减轻了单个节点的负担,增强了网络的可靠性。
为了解决安全问题,CLUSS协议融入了加密机制。在时间信息的交换过程中,节点使用密钥进行数据加密,防止恶意攻击者篡改或截取时间信息,从而确保同步的准确性和安全性。此外,协议可能还包含了身份验证和完整性检查机制,以防止未授权的节点参与同步过程。
论文中可能还分析了CLUSS协议的性能,包括同步精度、通信效率和抵抗攻击的能力。作者可能通过模拟实验和理论分析比较了CLUSS与其他已有的同步协议,展示了其在水下环境中的优势。
最后,论文可能会讨论协议的实现和未来的研究方向。实现部分可能涵盖了硬件和软件的需求,以及如何在实际的水下传感器网络中部署CLUSS。未来的研究可能关注于进一步提高同步效率、增强安全性或适应更复杂的网络拓扑结构。
这篇研究论文详细介绍了CLUSS协议,一种针对水下无线传感器网络的簇基安全同步方案,它解决了水下环境中时间同步的挑战,并提供了安全的保障,对于推动水下传感器网络的发展具有重要意义。
International Journal of Distributed Sensor Networks
of safe nodes is represented as a set
𝑠
and the set of
malicious nodes is represented as a set
𝑚
,where=
𝑠
∪
𝑚
.
Each node only knows about its direct neighboring nodes
and communicates with them when necessary without any
advanced knowledge about whether they are safe nodes or
malicious nodes. All sensor nodes are assumed to be static,
or they have low mobility with respect to signal propagation
speed. Every sensor node has the same transmission range
and is able to communicate with other sensor nodes within its
range. We also assume that each node is assigned with a triplet
of coordinate (,,), where each coordinate represents
the hop distance of the node from one anchor. All sensor
nodeshavethesamecommunicationrangeof,whichis
represented as a sphere volume of radius in a UWSN.
Denition 1. e function (,V) denes the distance
between two nodes
𝑢
and
V
in a D Euclidean space as
:×→Γ:
(
,V
)
,
(
,V
)
=
𝑥
−V
𝑥
2
+
𝑦
−V
𝑦
2
+
𝑧
−V
𝑧
2
.
()
Two nodes
𝑢
and
V
are neighbors and connected by a
link if (,V)<and the link between
𝑢
and
V
is denoted by
(,V).enodedegreeof
𝑢
is the number of links incident
to
𝑢
, which is denoted by
𝑢
.Weconstructthenetwork
topology with RNG (Relative Neighborhood Graph) [], and
then two nodes become neighbor nodes if and only if for
any arbitrary node
𝑝
, (,V)≤max{(,),(,V)}.For
a three-dimensional Euler space embedded, if the arcuate
area formed by the intersection of two spheres centered at
𝑢
and
V
(with radius (,V ))isempty,then
𝑢
and
V
are adjacent nodes. RNG algorithm is simple and is easily
built in a distributed way. ere is no crossing edges in
aRNGbecauseatleastoneedgeinanypairofcrossing
edges must be removed according to their denitions and
the time complexity is (
3
). While constructing from a
Delaunay Triangulation Graph structure, its complexity of
lower bound is (log())[]. In addition, a computational
method with the complexity of (
2
) for the RNG in a
three-dimensional space is given in []. As underwater
sensors oat with currents, their movements are constrained
in dierent horizontal planes and they are likely to maintain
a steady position relative to each other. e construction
of RNG does not require that the exact positions of nodes
and their neighbors are known. For each node, only the
corresponding mutual distances to its neighbors are required.
erefore, RNG is expected to be more suitable in modeling
UWSN, which achieves more accurate results and behaves
more consistently than other models. In fact, we model a
UWSN with a RNG, not form a RNG overlay on top of a
random geometric graph. e deployment of a UWSN is
deemed to be sparser than that of a terrestrial sensor network
duetothecostinvolvedandtothechallengesassociatedtothe
deployment itself in the underwater environment. erefore,
modeling a UWSN with a random geometric graph is not
suitable for selection in view of the connectivity especially
when sensor nodes are not evenly distributed.
Beacon
000
011
110
001
101
111
100
010
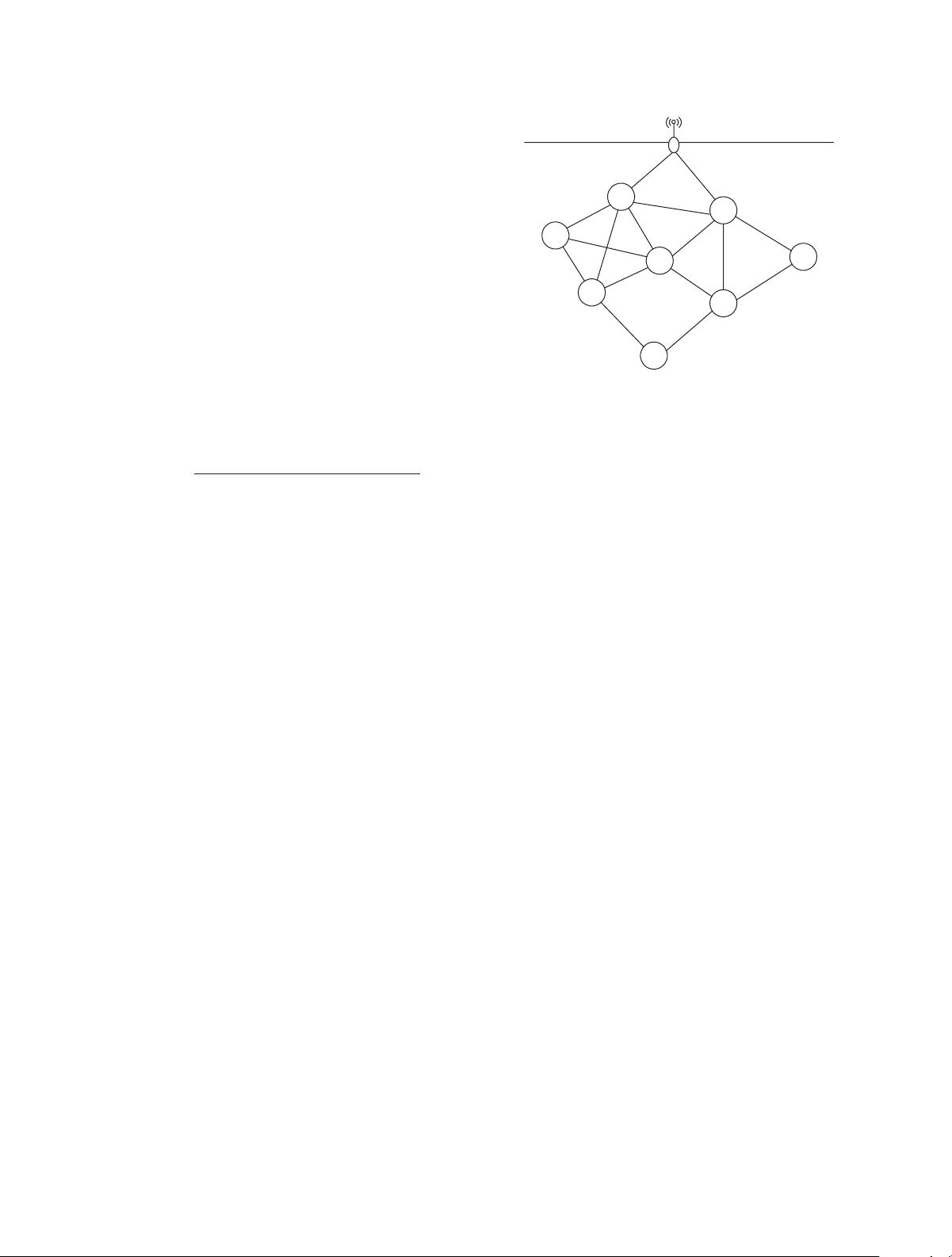
F:etopologyofaUWSNwithsensornodes.
CLUSS is a CLUster-based Secure Synchronization pro-
tocol. Given a UWSN, the whole network is composed of
three types of nodes: beacons, cluster heads, and ordinary
nodes. Beacons have unlimited energy resources and perfect
timing information. For example, they can synchronize to
UTC (Universal Time Coordinated) time constantly using
GPS services without recalibrating their atomic clocks or
performing any synchronization algorithms. In this regard,
they provide the time reference for the sensors positioned
underwater. If there are two or more beacons, they can
communicate with each other through radio frequency (RF)
links. Beacons communicate with cluster heads and ordinary
nodes through acoustic links. Each cluster has and only has
one cluster head. All ordinary nodes connect to their cluster
head via single hop. e cluster heads of dierent clusters
connect to a beacon through multiple hops. Figure shows
the topology of a UWSN with sensor nodes and one beacon.
e beacon is placed on the water surface and is equipped
withGPStoobtainUTCtime.Eachsensornodeisassigneda
unique identier (ID). e sensor nodes make autonomous
decision about cluster formation without any centralized
control.
Denition 2. Suppose that the cluster for node
𝑢
is denoted
as
𝑢
;thenforeachnode,
V
∈
𝑢
;if
V
=
𝑢
,thencluster
consistency is satised; else if there exists a node
𝑤
∈
𝑢
such
that
𝑤
=
𝑢
,thenitiscalledcluster inconsistency.
Denition gives the meanings of cluster consistency and
cluster inconsistency. According to Denition , each sensor
node belongs to one and only one cluster. Dierent clusters
cannot share any common sensor nodes. It is important for
sensor nodes to perform cluster consistency checking during
the process of cluster formation.
e process of cluster formation for a UWSN is described
as in the following step-by-step instructions.
Step 1. All sensor nodes with -hop distance to a beacon are
set to cluster heads.
Step 2. Each cluster head will try to add its neighboring nodes
as ordinary nodes that belong to its cluster in order of their
剩余12页未读,继续阅读
110 浏览量
2019-08-12 上传
2021-05-06 上传
109 浏览量
2021-02-07 上传
2021-02-11 上传
150 浏览量
2021-03-12 上传
2021-02-04 上传

weixin_38673694
- 粉丝: 3
- 资源: 949
 我的内容管理
展开
我的内容管理
展开







最新资源
- storemate-backend-leveldb-0.9.23.zip
- 模板1
- cas-server-support-spnego-4.0.0-RC3.zip
- 50个线型图标 .xd素材下载
- TrackersAway:开源AdsTrackers阻止程序和主机文件管理器
- league-team-selector:这是一个Legue板球队的选择者,可以让您的球队付出高昂的代价。 您可以通过选择玩家来计算费用
- JAVA-EE-Web-components-
- 免费开源!!Java 和本机 C++ 之间缺失的桥梁
- 易语言记事本程序
- EvaP:使用Django用Python编写的大学课程评估系统
- 用友现金流量过滤脚本.rar
- Electron-PWA-Wrapper:Electron Wrapper从具有脱机功能的渐进式Web应用程序创建桌面应用程序
- 网络编辑超级工具箱 1.0.rar
- sparta-react-calendar
- OpenCore_v0.6.0_RELEASE_07_29 黑果OC引导
- 【物联网国赛样题高职22单片机】zigbee按键长按连击呼吸灯维持当前亮度跑马灯综合代码
