步进电机控制详解:从入门到细分驱动
需积分: 12 158 浏览量
更新于2024-07-21
收藏 2.59MB PDF 举报
"这篇资源是关于步进电机控制的入门讲解,主要涵盖了步进电机的结构、细分控制原理、H桥驱动方法、矢量控制、加减速度控制以及衰减模式。通过学习,读者可以理解如何对步进电机进行有效的控制。"
详细内容:
步进电机是一种将电脉冲转化为角位移的执行机构,常用于精确定位和速度控制。在混合式步进电机中,结合了永磁和电磁铁两种类型的磁体,提供更高的效率和精度。细分控制是提高步进电机精度的关键技术,它通过改变电机线圈的电流相位,使得电机可以在一个脉冲下转过小于一个完整步进角度的角度,从而实现更平滑的运动。
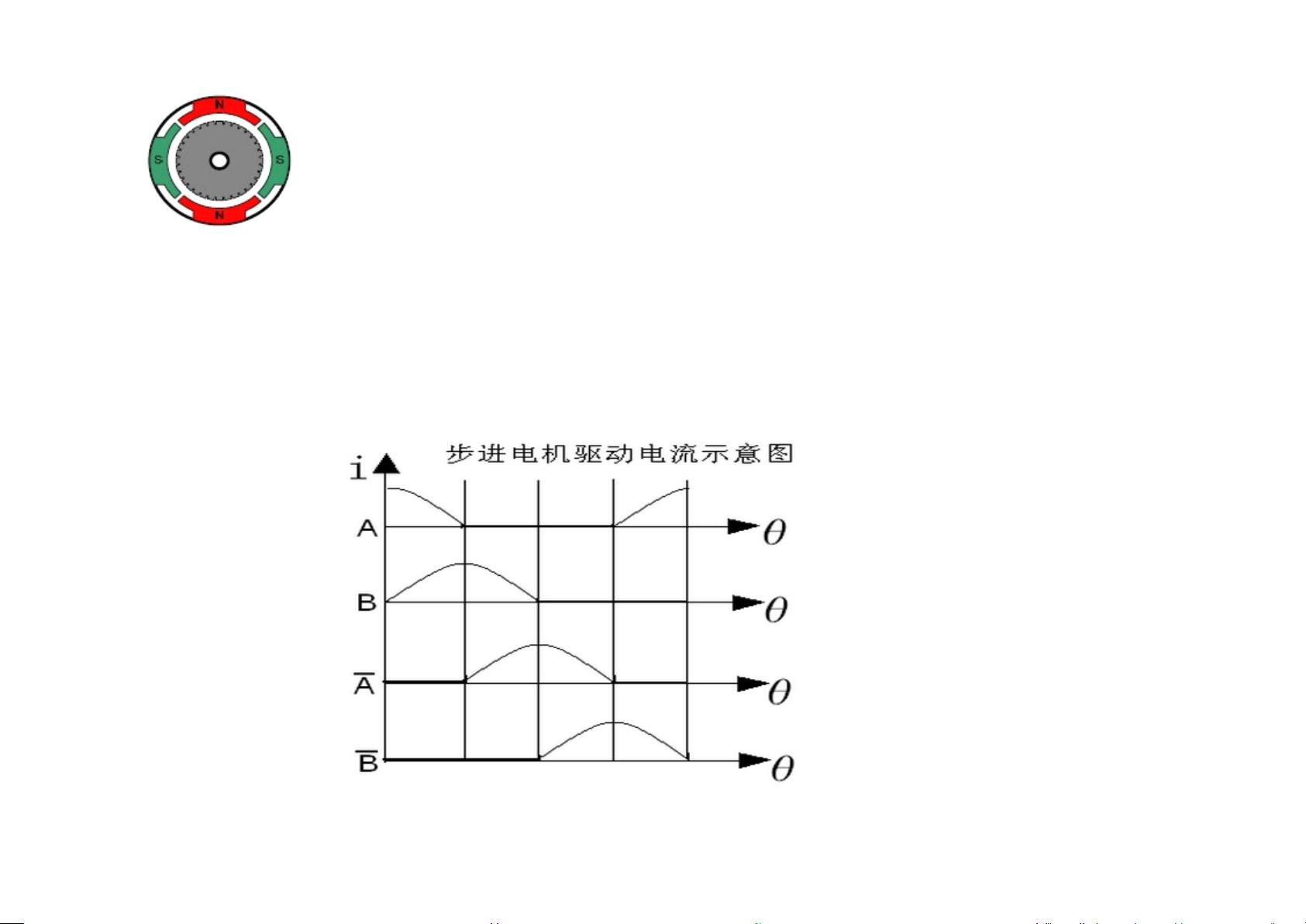
细分控制的工作原理是在线圈中施加不同相位的电流,形成一个合力的夹角,使电机转子以更小的步距角旋转。例如,对于二相四拍步进电机,每给定一个脉冲,电机转子会转动1/4个步进角。通过连续施加相位90度的正弦波电流,电机就能实现连续旋转。
H桥驱动是步进电机常用的一种驱动方式,它能控制电机的正反转。L6205这样的芯片可以实现恒流驱动,减少电机电感对低速性能的影响,确保微步距的一致性。此外,通过SPWM(脉宽调制)技术,可以根据需要调整电流的占空比,模拟出正弦波形,从而控制电机的转速和扭矩。
矢量控制是另一种高级的控制策略,主要用于动态调整电机的速度和位置。它可以根据目标位置和当前位置的关系,灵活调整电机的加速、减速和反转过程,以实现最佳的运动路径。矢量控制需要考虑电机的最大速度、负载情况以及适当的加减速曲线,以确保高效且平稳的运行。
步进电机的启动频率受到负载的影响,空载时可能达到1kHz,但带负载后会降低,需要通过实验确定。为了保证快速稳定地到达目标位置,加减速度控制至关重要。通常,采用指数曲线进行加速控制,因为步进电机的力矩随速度增加而指数下降。此外,也可以通过上位机软件进行加速度计算和拟合,简化控制过程。
步进电机控制涉及到多个方面,包括电机的物理特性、驱动电路设计、控制算法等。通过理解这些知识点,开发者可以更好地设计和实现步进电机的精确运动控制系统。
步进电机控制入门
4 相 8 拍 驱动波形
剩余21页未读,继续阅读
2009-06-20 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2019-09-14 上传
2012-06-11 上传

chuansong1234
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
