UCL深度学习课程:行为监督学习关键点讲解
需积分: 0 48 浏览量
更新于2024-07-01
收藏 2.67MB PDF 举报
在深度强化学习课程CS285中,Lecture 2聚焦于"Supervised Learning of Behaviors",由UC Berkeley的Sergey Levine教授讲解。这一部分的核心概念探讨了如何通过监督学习来理解并预测行为,尤其是在复杂的机器人控制和最优化理论的背景下。马尔可夫性质在此起到了关键作用,因为它假设系统状态的变化仅依赖于当前状态,而不受过去历史的影响。
课程内容首先定义了术语和符号,例如“runaway”,“ignore”和“pet”作为不同状态下机器人的行为模式。马尔可夫链的概念强调了状态的无后效性,这是预测未来状态的重要依据。此外,讲座还提及了Richard Bellman和Lev Pontryagin等在控制理论中的角色,他们的工作促进了对这类问题的数学建模。
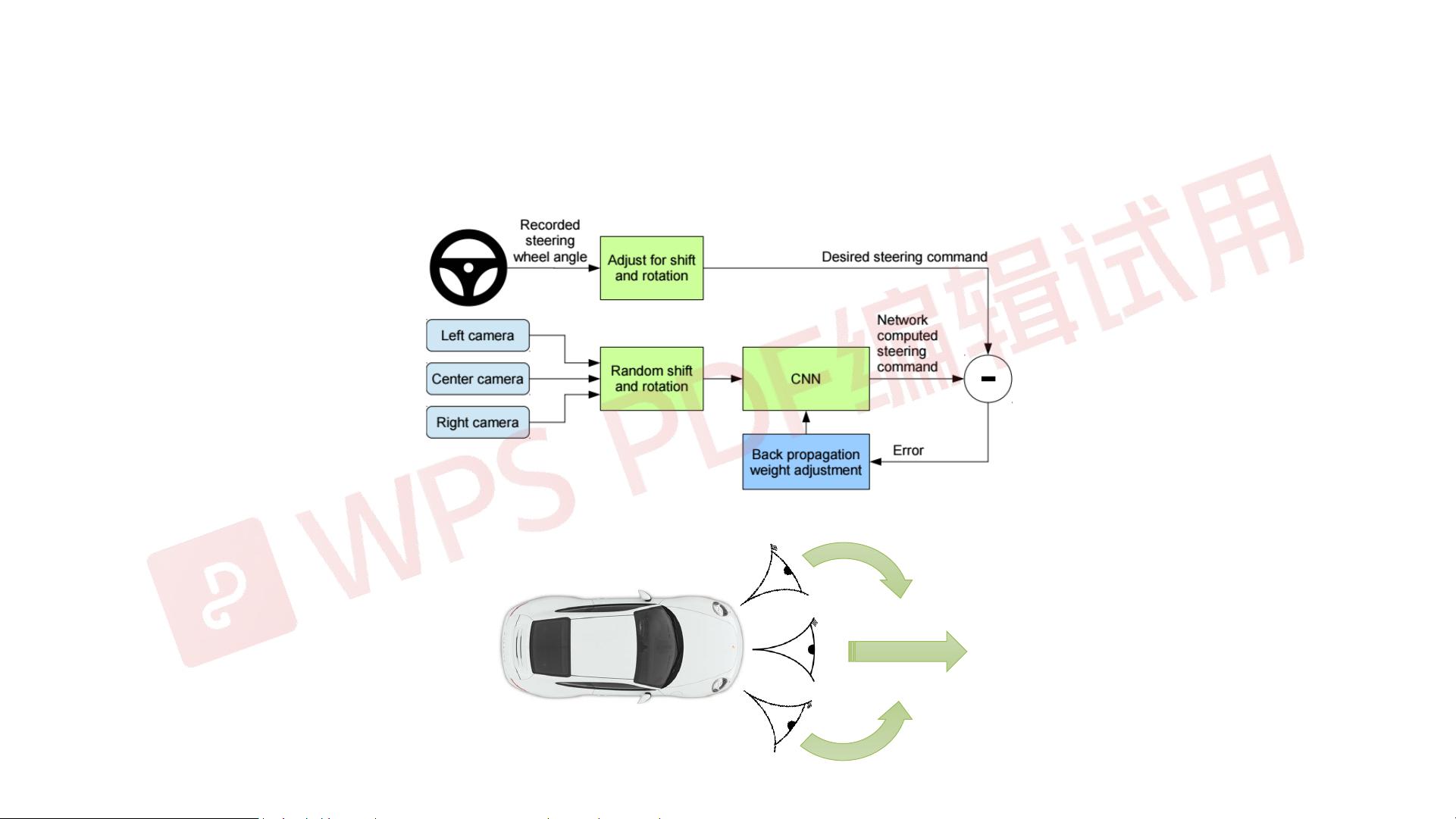
然后,课程深入讨论了监督学习的应用,如行为 cloning(模仿学习)的经典案例ALVINN,这是一个早期的自动驾驶系统。尽管监督学习在初始阶段可能表现良好,但随着时间推移,由于可能出现训练误差,导致模型预测到的未来状态超出训练数据范围(Out-of-Distribution, OOD),从而导致更大的预测误差。为了改进这一点,Bojarski等人在2016年的研究展示了利用左右摄像头校正错误的例子,这有助于提高系统的稳定性。
课程进一步介绍了Dagger(Dataset Aggregation)算法,这是一种迭代的过程,它不直接优化策略,而是通过改进训练数据的质量来提升性能。Dagger通过将策略应用于生成数据的过程中,并人工标注结果,将策略产生的新数据与原始数据融合,以此来纠正模型的不足,使得模型在实际应用中能更频繁地正确工作。
Lecture 2围绕着监督学习在行为理解和控制中的优势与挑战,以及如何通过结合其他方法,如视觉辅助和数据增强技术,来提高模型的稳定性和泛化能力。这为理解深度强化学习中如何利用监督信号来指导行为学习提供了重要的理论基础和技术手段。
Does it work?
Yes!
Video: Bojarski et al. ‘16, NVIDIA
剩余43页未读,继续阅读
2021-01-06 上传
2015-07-25 上传
2021-03-08 上传
2021-05-04 上传
2021-03-27 上传
2021-05-22 上传

小帅吖
- 粉丝: 2081
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
