控制系统设计-第六章概览与校正方法
需积分: 0 83 浏览量
更新于2024-06-30
收藏 4.9MB PDF 举报
"自动控制原理第六章控制系统设计,主要内容包括控制系统设计概述、常用校正环节以及基于频域法和根轨迹法的串联校正方法。由马磊教授在电气工程学院讲授,涉及到控制系统设计的主要步骤,如性能指标分析、系统数学模型建立、系统校正等。"
在自动控制原理中,第六章主要探讨的是控制系统的设计,这是实现精确控制和优化系统性能的关键环节。由马磊老师在电气工程学院讲解,本章内容包括以下几个方面:
1. 控制系统设计概述
- 主要步骤:首先,要分析性能指标,例如时域中的超调量(ess)、调节时间(Ts)和上升时间(Tr),以及频域中的增益(g)、相角裕度(wg)和幅值裕度(Mr)。这些指标是评价控制系统性能的重要标准。设计师需要根据系统需求和工艺条件来合理设定性能指标。
- 建立数学模型:根据系统结构图,通过分析法或实验测量法确定各环节的传递函数和参数。
- 检查性能:分析系统是否满足预设的性能指标,如果不满足则需进行校正。
- 系统校正:通过添加校正环节来改善性能,可能包括串联校正、局部反馈校正、前馈校正和复合校正等。
- 校正后评估:校正后再次检查指标,不满意则继续调整,直至满足要求。
2. 控制系统校正
- 校正方式:包括串联校正,可以影响整个系统的频率响应;局部反馈校正,只影响系统的一部分;前馈校正,用于补偿不可预见的扰动;以及输出和输入校正。
- 校正方法:为了提高静态性能,可以通过增加开环增益或引入积分环节;为了改善动态性能,通常会利用频率法调整频率响应特性,或者通过根轨迹法调整闭环极点的位置。
3. 基于频域法的串联校正
- 频率法是通过调整系统在频域的表现,如增益交叉点(gm)和截止频率(wc),来同时改善静态和动态性能。
4. 基于根轨迹法的串联校正
- 根轨迹法侧重于调整闭环极点的位置,以改变系统的动态响应,如超调量和调节时间。
控制系统设计是控制理论的核心部分,它涉及对实际系统的深刻理解,数学建模技能,以及选择和实施适当的校正策略,以确保系统的稳定性和性能。通过马磊老师的讲解,学生将能够掌握这些关键概念,并运用到实际的控制系统设计中。
自动控制原理:第六章 控制系统设计
16
6.2 常用校正环节
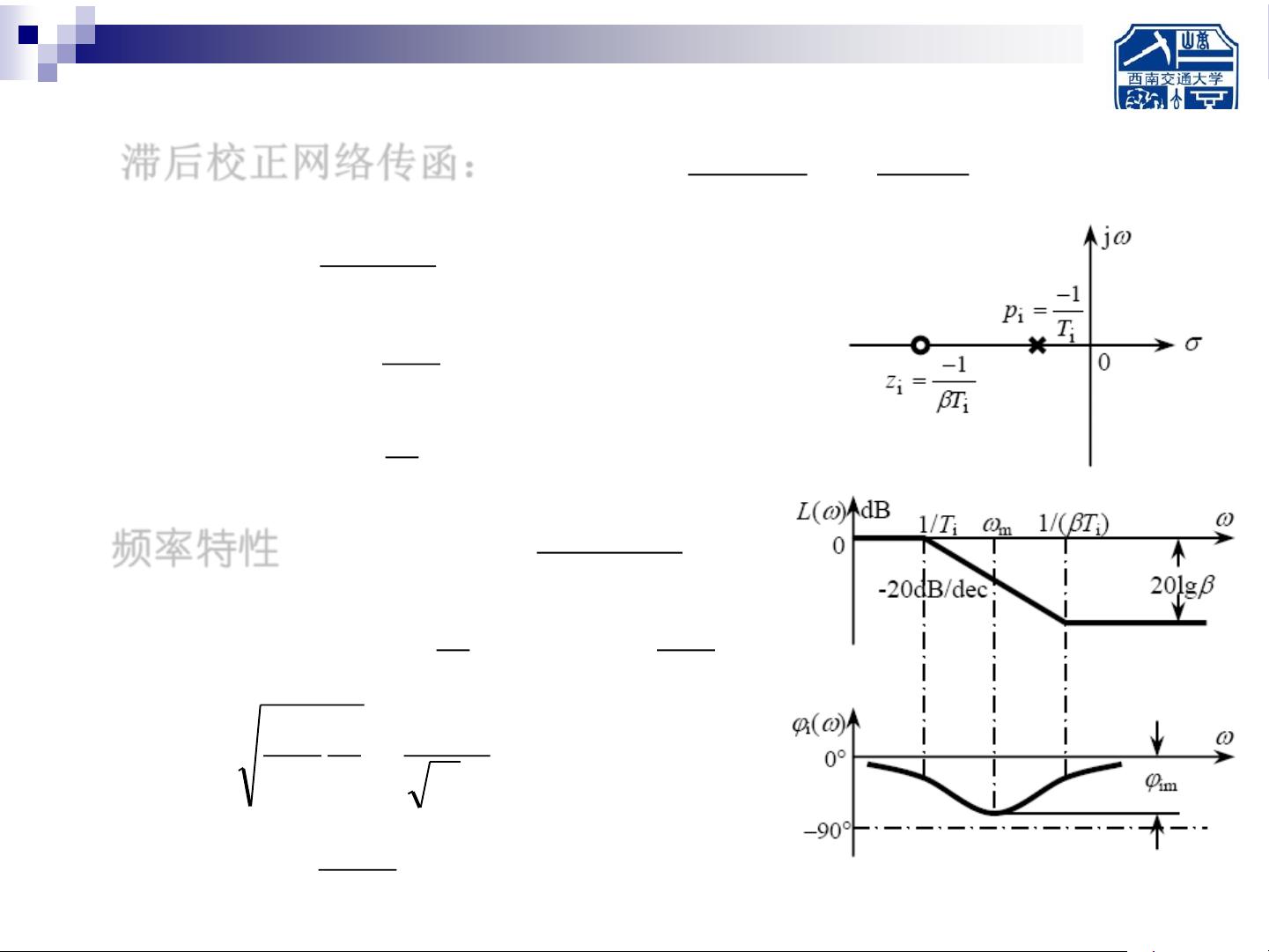
滞后校正网络传函:
其中
i
i
i
i
c
ps
zs
sT
sT
sG
1
1
)(
(6.7)
CRRT
RR
R
i 21
21
2
,1
零点:
极点:
i
i
T
z
1
i
i
T
p
1
ii
pz
频率特性:
w
w
w
i
i
c
jT
Tj
jG
1
1
)(
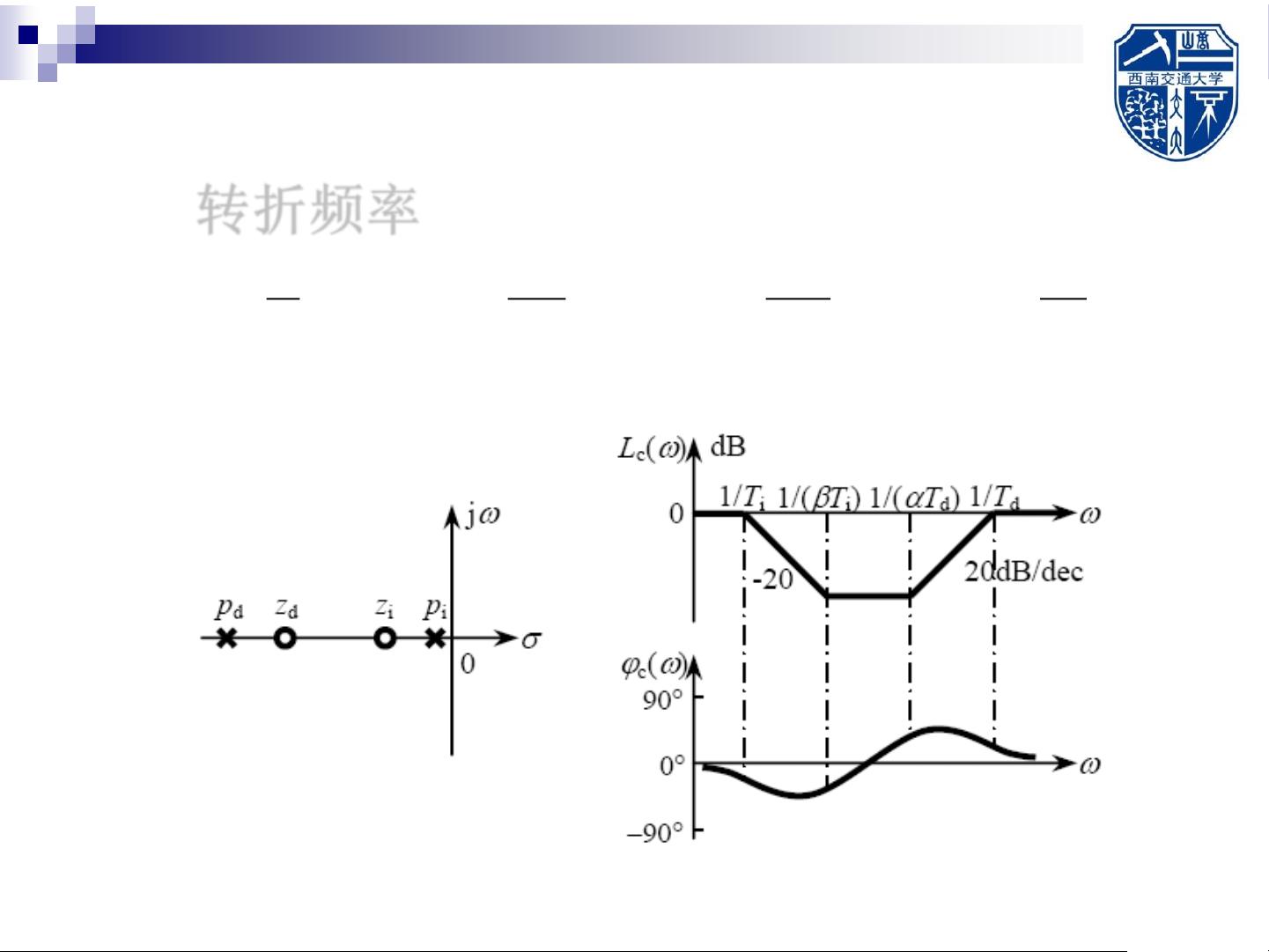
转折频率:
i
i
i
i
z
T
p
T
ww
1
,
1
21
i
ii
m
T
TT
w
111
)(
1
1
sin
1
为负角
mm
(6.8)

剩余99页未读,继续阅读
2011-07-14 上传
2022-06-15 上传
2022-09-23 上传
2021-09-30 上传
2022-06-15 上传
2022-06-29 上传
2010-10-20 上传

永远的12
- 粉丝: 676
- 资源: 320
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握压缩文件管理:2工作.zip文件使用指南
- 易语言动态版置入代码技术解析
- C语言编程实现电脑系统测试工具开发
- Wireshark 64位:全面网络协议分析器,支持Unix和Windows
- QtSingleApplication: 确保单一实例运行的高效库
- 深入了解Go语言的解析器组合器PARC
- Apycula包安装与使用指南
- AkerAutoSetup安装包使用指南
- Arduino Due实现VR耳机的设计与编程
- DependencySwizzler: Xamarin iOS 库实现故事板 UIViewControllers 依赖注入
- Apycula包发布说明与下载指南
- 创建可拖动交互式图表界面的ampersand-touch-charts
- CMake项目入门:创建简单的C++项目
- AksharaJaana-*.*.*.*安装包说明与下载
- Arduino天气时钟项目:源代码及DHT22库文件解析
- MediaPlayer_server:控制媒体播放器的高级服务器
