SOFA框架:交互式物理模拟的多模型翻译
需积分: 23 181 浏览量
更新于2024-07-10
收藏 4.68MB DOCX 举报
"SOFA A Multi-Model Framework for Interactive Physical Simulation 翻译"
SOFA(Simulation Open-Source Framework,开源模拟框架)是一个多模型的交互物理模拟框架,由François Faure、Christian Duriez、Hervé Delingette、Jérémie Allard、Benjamin Gilles等人开发,并在医疗手术模拟领域得到了应用。该框架的设计目标是支持多种物理模型的集成,以实现对复杂物理现象的高效、实时的模拟,特别适用于计算机辅助手术的软组织生物力学建模。
SOFA的核心特性包括以下几个方面:
1. **多模型支持**:SOFA能够支持各种物理模型,如刚体动力学、流体动力学、连续介质力学等,这使得它在模拟不同类型的物理现象时具有高度的灵活性和适应性。
2. **开放源代码**:作为一个开源项目,SOFA的源代码可供研究者和开发者查看、修改和扩展,促进了技术的发展和创新。
3. **模块化设计**:框架采用模块化结构,允许用户根据需要组合和定制不同的物理模拟模块,以满足特定应用场景的需求。
4. **交互性**:SOFA强调与用户的交互,能够实时反馈模拟结果,这对于手术模拟来说至关重要,因为它可以让医生在虚拟环境中进行预演,提高手术的成功率。
5. **可扩展性**:SOFA通过插件机制提供可扩展性,用户可以开发新的物理引擎或算法来扩展框架的功能。
6. **跨平台**:SOFA能够在多种操作系统上运行,如Windows、Linux和macOS,这为广泛的用户群体提供了便利。
在医疗手术模拟领域,SOFA的应用包括但不限于以下方面:
- **软组织模拟**:通过复杂的数学模型,模拟人体软组织的弹性、塑性和剪切行为,为手术规划和训练提供逼真的环境。
- **生物力学分析**:帮助研究人员理解生物组织在手术操作中的力学响应,从而优化手术技术和器械设计。
- **教育与培训**:为医学生和医生提供无风险的模拟训练,提高他们的技能和决策能力。
- **手术导航**:实时模拟手术过程,为医生提供精确的导航信息,减少手术风险。
SOFA的相关工作在Yohan Payan的《Soft Tissue Biomechanical Modeling for Computer Assisted Surgery》一书中有所详细介绍,这本书是《Studies in Mechanobiology, Tissue Engineering and Biomaterials》系列的一部分,由Springer出版社出版,书号978-3-642-29013-8。
引用此版本的信息应为:
François Faure, Christian Duriez, Hervé Delingette, Jérémie Allard, Benjamin Gilles, et al. SOFA: 交互式物理模拟的多模型框架。Yohan Payan. 计算机辅助外科手术的软组织生物力学建模,11,斯普林格,283-321页,2012,机械生物学研究,组织工程和生物材料,978-3-642-29013-8。ff10.1007/8415_2012_125ff。ffhal-00681539ff
HAL标识符:hal-00681539
SOFA作为一个强大的工具,不仅推动了医疗领域的科技进步,也为其他需要物理模拟的领域,如游戏开发、动画制作等,提供了有价值的参考和实践基础。

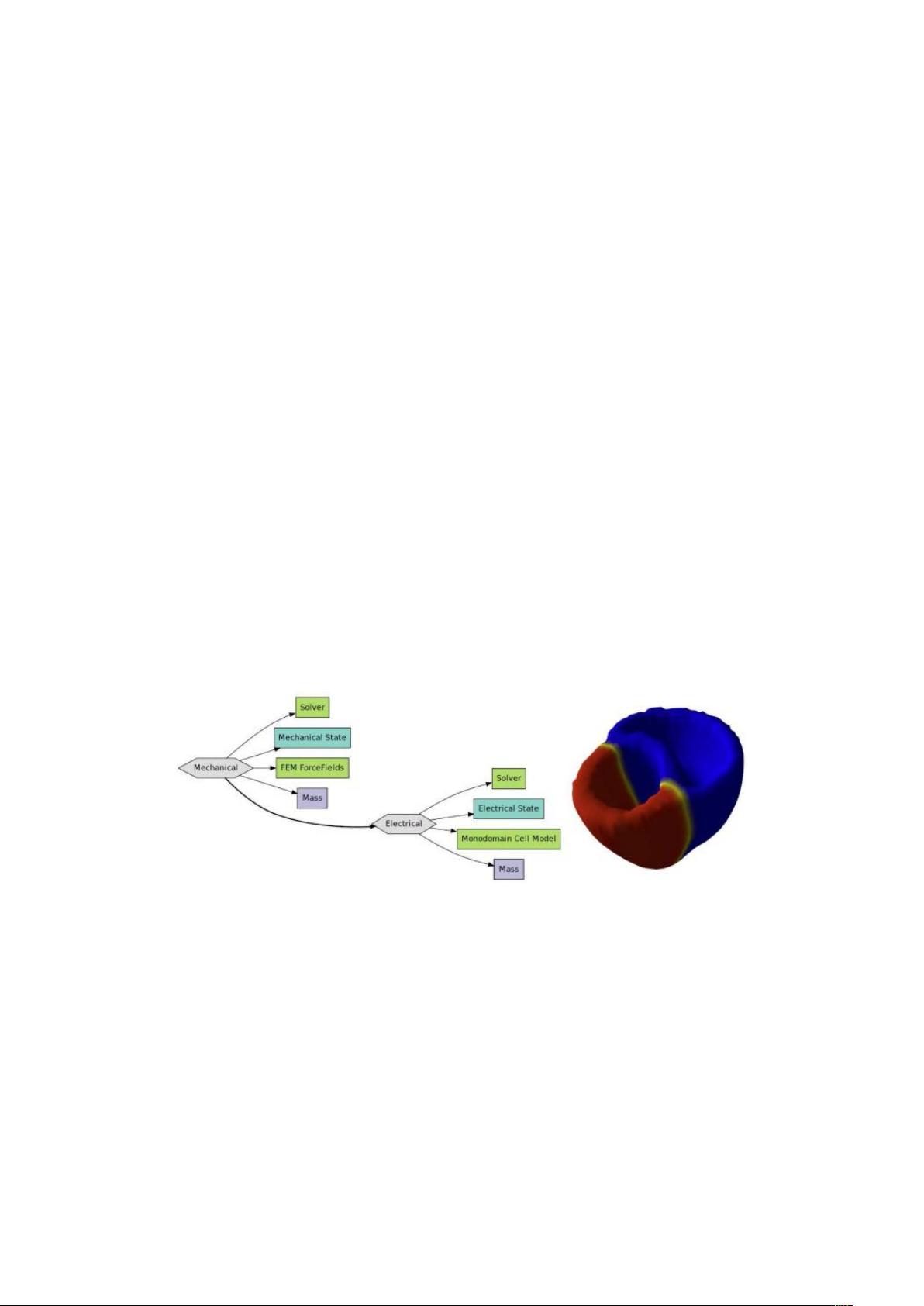
用矩阵 P 实现乘积,以消除图中正方形中描述的粒子位移。EulerSolver 实现了时间整合的
逻辑。在这个例子中,组件之间的连接不需要显式表示。每个组件都可以查询它的父节点来
访问本地的机械状态和拓扑。高级算法,比如时间整合,是通过访问者遍历数据结构来实现
的,如第 3 节和第 4 节所述。
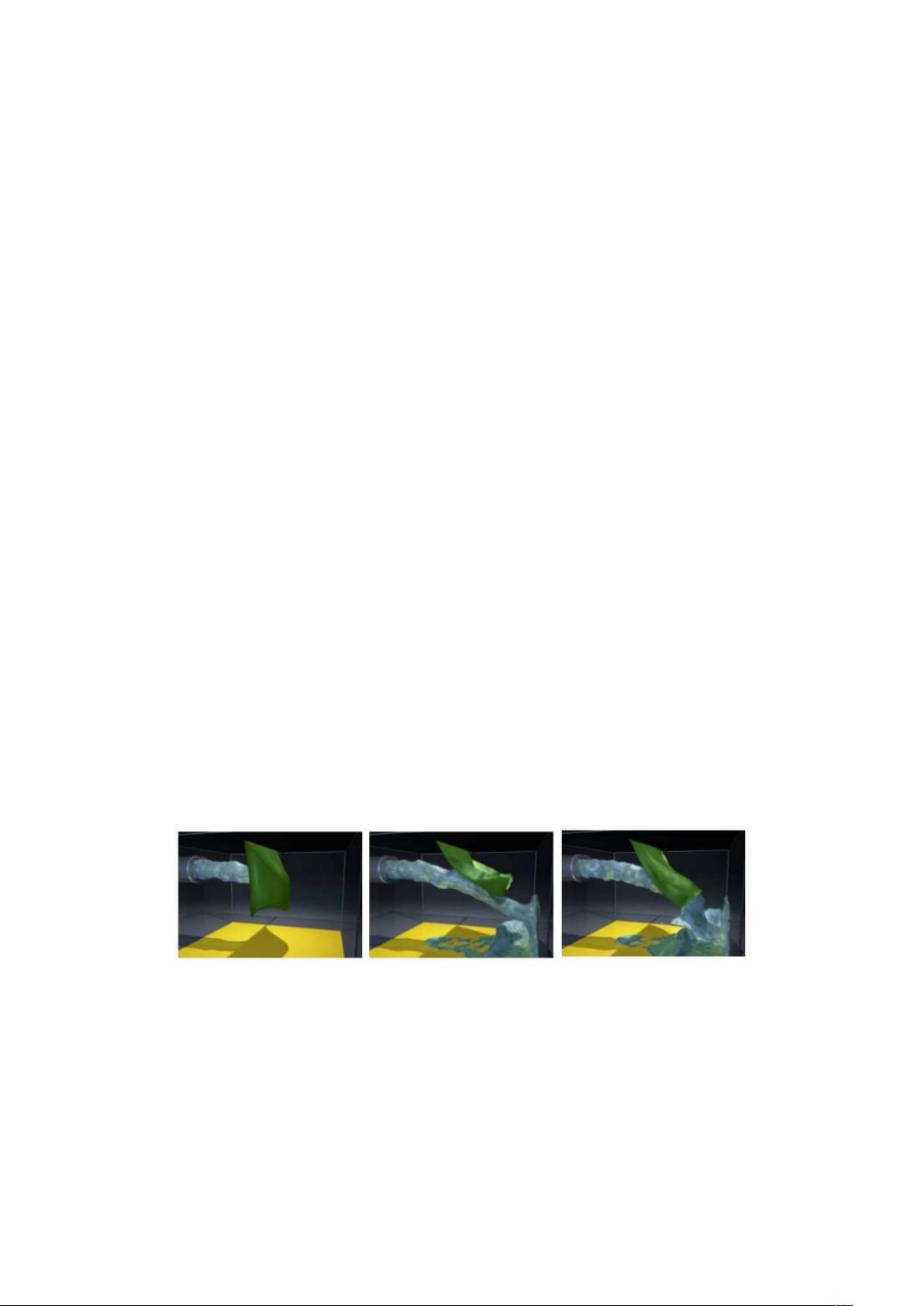
This design is highly modular because the components are completely indepen-dent of each other.In
the example of Figure 2, replacing springs with FEM for the membrane force only requires to
replace SpringForceField with TriangleFEMFor-ceField.Similarly, the mass matrix, stored as
diagonal matrix in this example, can be stored as a single scalar value (UniformMass) if less
accuracy but faster compu-tation is sought, in combination with an iterative implicit solver for
instance.
这种设计是高度模块化的,因为组件是完全独立的。在图 2 的例子中,用薄膜力有限
元法代替弹簧只需要用三角形有限元法代替弹簧力场。类似地,在本例中存储为对角矩阵的
质量矩阵可以存储为单个标量值(均匀质量),如果需要更低的精度但更快的计算,例如结合
迭代隐式求解器。
For efficiency, the MechanicalState contains the state vectors of all the simulation nodes of the
object, to avoid multiple calls of virtual functions.The vector size is the number of nodes, and each
vector entry has the size of the node type, such as 3 for 3d particles.We use C++ templates to avoid
code redundancy between scalar types (float, double) and between node types (particles or frames,
in 1d, 2d or 3d, or generalized coordinates).In this document, the type instances are shown in the
scenegraph figures when necessary, and omitted most of the time.All the nodes in a vector have the
same type, known at compile time, to allow aggressive compiler optimizations.Simulation nodes of
different types must be gathered in different MechanicalStates attached to different scenegraph
nodes, possibly connected with interaction forces, as discussed in Section 3.
为了提高效率,MechanicalState 包含对象所有模拟节点的状态向量,以避免虚函数的
多次调用。矢量大小是节点的数量,每个矢量条目都有节点类型的大小,例如 3 代表 3d 粒
子。我们使用 C++模板来避免标量类型(浮点型、双精度型)和节点类型(一维、二维或三维或
广义坐标中的粒子或帧)之间的代码冗余。在本文档中,类型实例在必要时显示在场景图中,
并且在大多数情况下被省略。向量中的所有节点都具有相同的类型,在编译时已知,以允许
积极的编译器优化。不同类型的模拟节点必须以不同的机械状态聚集在不同的场景节点上,
可能与相互作用力有关,如第 3 节所述。
More than 30 classes of forces are implemented in SOFA, including springs, FEM for volumetric
(tetrahedron or hexahedron) or surface (triangular shell and membrane) deformable objects using
corotational or hyperelastic formulations, and for wire or tubular object (beam models meshed with
segments), have been im-plemented.Different types of elastic forces allow for easy and fast
modeling of the deformations (bending, compression/traction, volume, interactions between two
bodies, joints...).In rigid objects, the main components are the degrees of freedom (a single frame
with 3 rotations and 3 translations) and the mass matrix that con-tains the inertia of the
object.Surfaces can be attached to objects using mappings, as discussed in Section 2.5.
在 SOFA 中实现了 30 多种类型的力,包括弹簧、使用共转或超弹性公式的体积(四面
体或六面体)或表面(三角形壳和膜)可变形物体的有限元法,以及线或管状物体(与分段网格
的波束?(beam 翻译为)的有限元法。不同类型的弹性力允许对变形(弯曲、压缩/牵引、体积、
两个物体之间的相互作用、关节...).在刚性物体中,主要组成部分是自由度(一个有 3 个旋转
剩余59页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2018-06-24 上传
2021-05-13 上传
2022-09-23 上传
2021-05-30 上传
2021-03-31 上传
2021-06-10 上传

cuijianzhu
- 粉丝: 10
- 资源: 11
 我的内容管理
展开
我的内容管理
展开







最新资源
- CoreOS部署神器:configdrive_creator脚本详解
- 探索CCR-Studio.github.io: JavaScript的前沿实践平台
- RapidMatter:Web企业架构设计即服务应用平台
- 电影数据整合:ETL过程与数据库加载实现
- R语言文本分析工作坊资源库详细介绍
- QML小程序实现风车旋转动画教程
- Magento小部件字段验证扩展功能实现
- Flutter入门项目:my_stock应用程序开发指南
- React项目引导:快速构建、测试与部署
- 利用物联网智能技术提升设备安全
- 软件工程师校招笔试题-编程面试大学完整学习计划
- Node.js跨平台JavaScript运行时环境介绍
- 使用护照js和Google Outh的身份验证器教程
- PHP基础教程:掌握PHP编程语言
- Wheel:Vim/Neovim高效缓冲区管理与导航插件
- 在英特尔NUC5i5RYK上安装并优化Kodi运行环境
