"室内机器人视觉定位与建图的SLAM技术研究"
需积分: 0 14 浏览量
更新于2023-12-29
收藏 5.04MB PDF 举报
室内机器人的视觉定位与建图是一个关键的问题,在机器人导航、智能家居、无人驾驶等领域具有广泛的应用前景。传统的定位与建图方法存在累积误差问题,而如果机器人能够识别自己曾经去过的地方,就可以大幅消除累积误差,提高定位与建图的精度。
本研究选取清华大学的高翔博士学位研究生作为研究对象,通过导师宋靖雁教授和副导师张涛教授的指导,开展了关于室内机器人的视觉定位与建图的研究工作。
研究的目标是使用机器人的视觉信息进行定位与建图,通过机器人对环境的感知和对自身位置和姿态的估计,实现室内环境地图的构建。具体而言,研究包括以下几个方面:问题建模、经典方法、系统实现和实验验证。
在问题建模方面,研究采用了基于扩展卡尔曼滤波(EKF)的 SLAM(Simultaneous Localization and Mapping)方法和基于粒子滤波器的 SLAM方法。这两种方法都是常见的解决定位与建图问题的方法,可以从不同的方面对机器人的位置和姿态进行估计,进而构建环境地图。
在经典方法方面,研究对比了基于 EKF 的 SLAM和基于粒子滤波器的 SLAM的优缺点。基于 EKF 的 SLAM方法具有较好的实时性,但容易受到状态估计误差的影响;而基于粒子滤波器的 SLAM方法能够更好地处理非线性问题,但计算复杂度较高。研究比较了这两种方法在不同场景下的表现,并对它们的各种参数进行了优化。
在系统实现方面,研究搭建了机器人实验平台,包括了视觉传感器、定位传感器和控制系统。研究开发了相应的算法和程序,实现了机器人的环境感知和自身位置估计等功能。
在实验验证方面,研究进行了一系列的实验,验证了所提方法的有效性和性能。实验结果表明,基于 EKF 的 SLAM方法在实时性和稳定性方面表现较好,适用于快速变化的环境;而基于粒子滤波器的 SLAM方法在处理非线性问题和精度要求较高的场景下表现较好。
本研究的工作计划包括对现有方法的改进和优化,对新的算法和技术的研究和应用,以及对实验结果的进一步分析和验证。研究还将探索机器人的自主导航和路径规划等问题,进一步提高机器人的定位与建图能力。
总之,室内机器人的视觉定位与建图是一个具有重要研究价值和实际应用意义的课题。本研究通过对问题建模、经典方法、系统实现和实验验证的研究,提出了一种基于机器人视觉的定位与建图方法,并通过实验证明了该方法的有效性和性能。未来的研究将进一步完善该方法,并探索更多的算法和技术,以提高室内机器人的定位与建图能力。
第 2 章 常见研究点与经典方法
第 2 章 常见研究点与经典方法
2.1 问题建模
SLAM 研究源起于 1986 年 Smith 的论文
[8,9]
,称为对环境空间位置关系的估
计。在该论文中,定位问题是指机器人的运动轨迹,地图则由一系列路标点构成。
Smith 将 SLAM 问题建构为一个扩展卡尔曼滤波器(Extended Kalman Filter, EKF),
估计机器人与空间中路标点的位置,去除观测数据中的高斯噪声。EKF 一直在早
期的 SLAM 中占据主导地位,例如 SIFT 特征的提出者 Lowe 曾用 EKF 和 SIFT 实
现了视觉 SLAM
[10]
,最早的实时视觉 SLAM 系统即是基于 EKF
[1]
。而后,粒子滤
波器(Particle Filter),FastSLAM 以及基于优化的方法才逐渐兴起。这个建模的过
程,通常称为 SLAM 的基础理论。
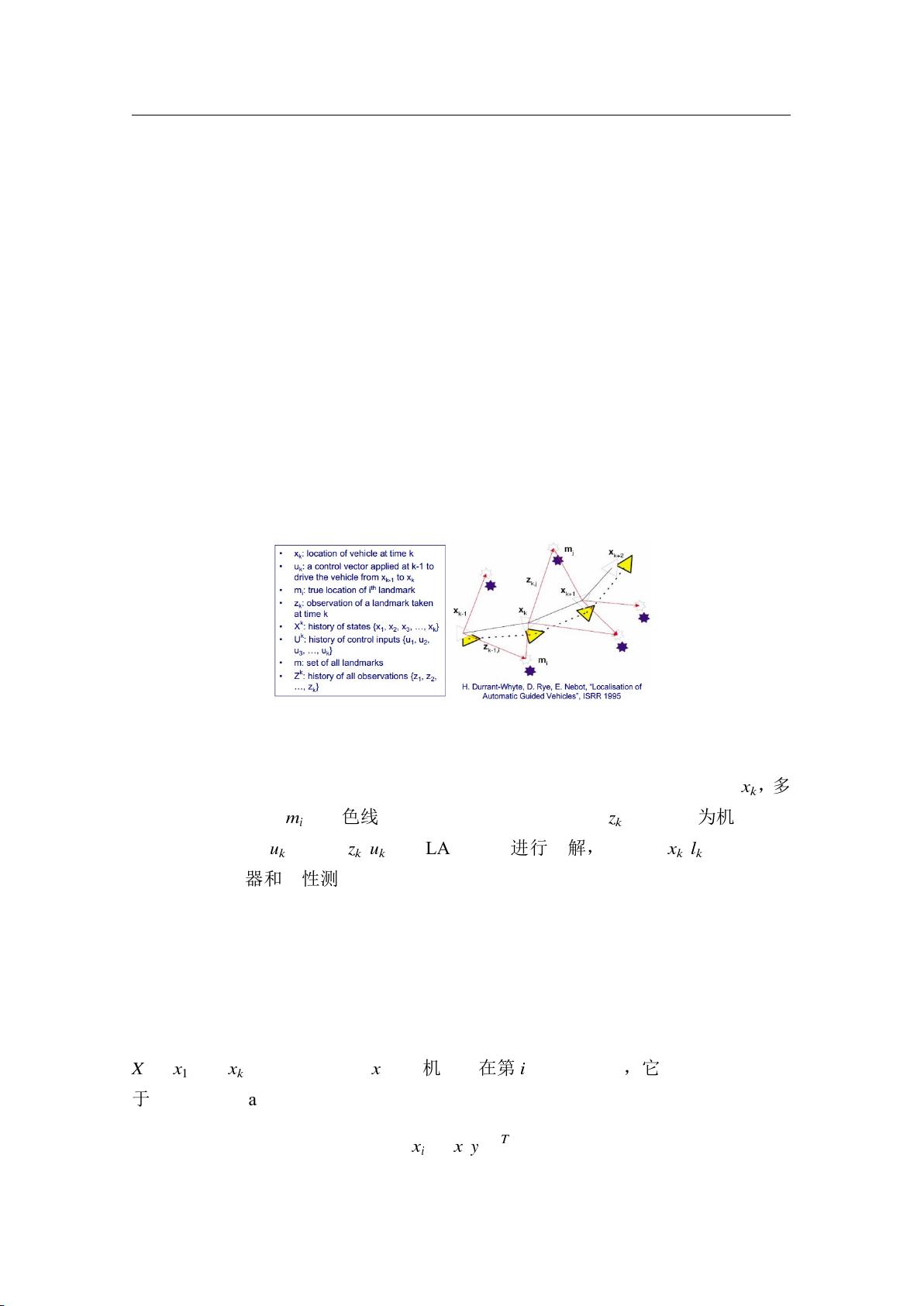
图 2.1 SLAM 问题示意图
图2.1 为传统基于标志的 SLAM 示意图。三角形为机器人的位置与姿态
x
k
,多
边形为地图的标志
m
i
,红色线为传感器对这些标志的观测
z
k
,蓝色线为机器人惯
性传感器的增量
u
k
。根据
z
k
,
u
k
对 SLAM 问题进行求解,可得到
x
k
,
l
k
的估计值。
然而由于传感器和惯性测量设备均存在误差,得到的轨迹与地图通常与真实情况
存在着一定的偏差。如何减少噪声带来的影响,建立准确、一致的地图,是 SLAM
研究者们关心的主要问题。
2.1.1 基于 EKF 的 SLAM
首先介绍 EKF SLAM。该模型使用的数学符号如下:机器人的运动轨迹:
X
=
{
x
1
, . . . ,
x
k
}
,其中每一个
x
表示机器人在第
i
时刻的位姿,它的具体内容取决
于参数化(parameterization)。若机器人在平面上运动,则使用 2D 的参数:
x
i
=
x
,
y
, θ
T
3
下载后可阅读完整内容,剩余24页未读,立即下载
相关推荐





袁大岛
- 粉丝: 41
 我的内容管理
展开
我的内容管理
展开








最新资源
- MIMO衰落信道容量分析与MATLAB仿真实现
- A*算法实践:物体寻路动画小游戏
- 利用MD5值快速终止进程并重命名文件
- PIC16F1829中文数据手册完整版下载
- 掌握Oracle XML Publisher创建Oracle报告技巧
- 项目稳定使用的DB2数据库jar包介绍
- Android实现简单音乐播放器及其登录注册功能
- BBQLinux Java Switcher 免费软件介绍
- 豆瓣Top250电影图书数据爬取指南
- 数字水印嵌入提取技术:DCT与SVD解析
- 中文版sniff抓包工具:界面简洁易用
- SDBoot烧写工具源码解压指南
- MES系统中HSMS开发专用SECS E37协议文档
- EkRTF报表控件:Delphi报表工具的简易制作方案
- Hippy框架介绍:Web前端跨端开发利器
- 先飞电脑技术网全站源代码下载及美化指南
