MATLAB下二级倒立摆建模与LQR最优控制仿真
"二阶倒立摆的建模与MATLAB仿真"
二阶倒立摆是一种复杂的机械系统,常被用于控制系统理论的研究,因为它涉及到非线性、强耦合和多变量的问题。在控制理论中,倒立摆的稳定性和动态性能是评估控制策略有效性的重要指标。本文主要探讨了如何使用MATLAB和Simulink工具对二阶倒立摆进行建模和仿真。
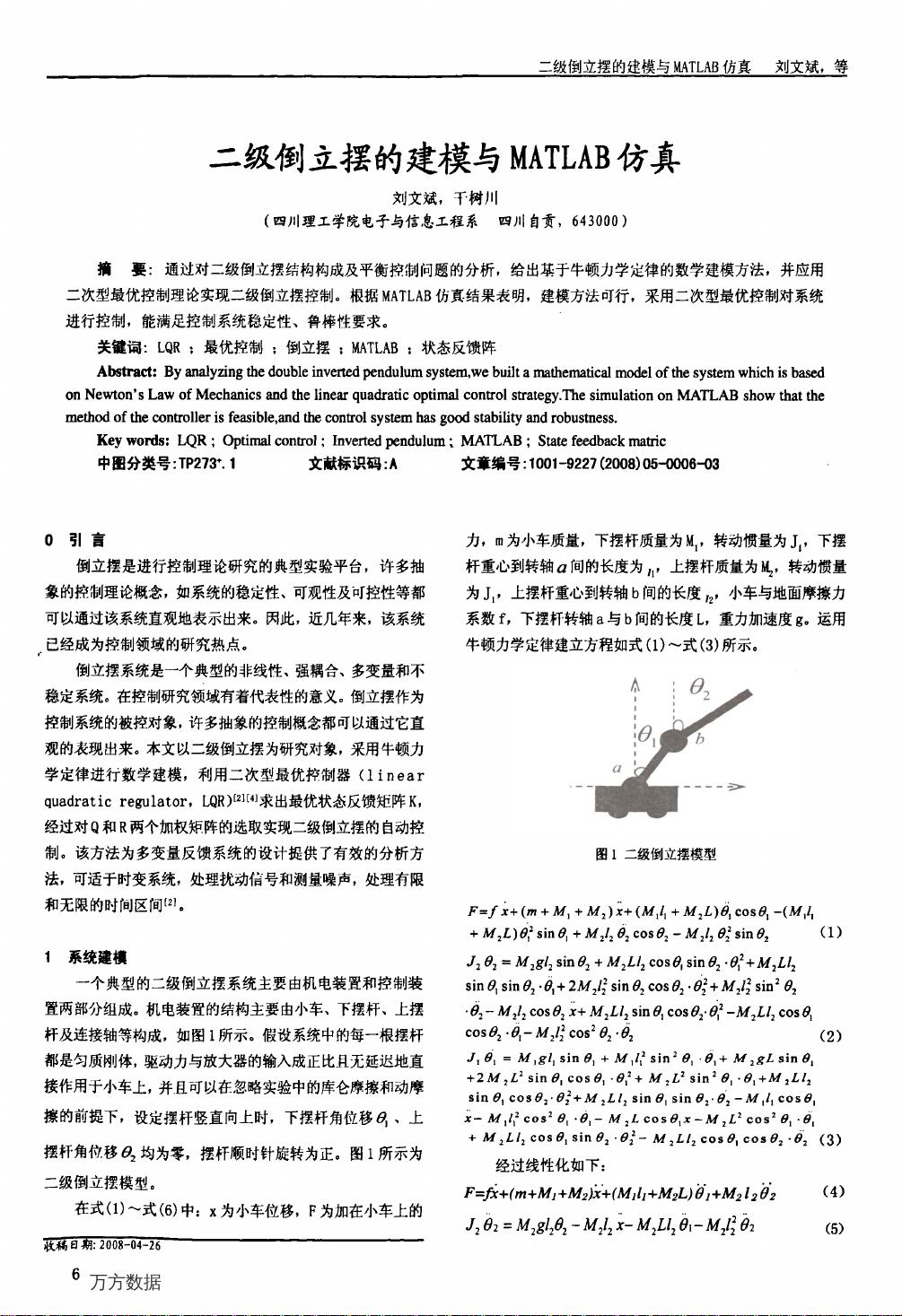
首先,建立二阶倒立摆的数学模型是整个研究的基础。这一过程通常基于牛顿力学定律,通过分析倒立摆的结构和动力学特性,建立系统的运动方程。对于二阶倒立摆,系统包含两个摆动角度,这使得它的动力学行为比单摆更为复杂。在数学建模过程中,需要考虑重力、惯性力以及关节摩擦等因素,最终形成一个由多个微分方程组成的非线性系统。
接下来,文章提到了使用二次型最优控制(LQR)理论来设计控制器。LQR是一种广泛应用的反馈控制策略,它可以寻找使系统性能指标最小化的状态反馈矩阵K。LQR方法需要定义两个加权矩阵Q和R,Q矩阵用于衡量系统状态的偏差,而R矩阵则影响控制输入的成本。通过调整这两个矩阵,可以优化控制性能,如增加系统的稳定性或减少控制力的大小。
在MATLAB环境中,Simulink作为一个强大的仿真工具,可以用来验证和优化上述模型和控制器。通过设置适当的初始条件和边界条件,Simulink能够模拟二阶倒立摆的动态行为,观察控制策略对系统稳定性的影响。仿真结果能直观地展示倒立摆的摆动轨迹,以及控制信号的变化,从而评估控制算法的有效性。
二阶倒立摆的建模与仿真研究对于理解非线性系统的控制策略具有重要的实践价值。MATLAB和Simulink的结合使用,为控制工程师提供了强大的工具,能够设计并测试高级控制算法,这对于实际应用中的复杂系统控制具有重要意义。此外,这种方法也适用于教育和研究领域,帮助学生和研究人员深入理解控制理论和实践。
万方数据
下载后可阅读完整内容,剩余3页未读,立即下载
相关推荐




liuhanyu0818
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 《Div+CSS布局大全》网页设计教程
- C#编码规范指南:最佳实践与命名约定
- UML精粹第三版:快速掌握UML 2.0核心内容
- SQL精华语句:创建、修改、查询数据库与表
- Java设计模式解析与实战
- 数字水印技术:多媒体信息的安全守护者
- 中国电信MGCP协议测试规范详解
- Hibernate入门与实战指南
- 华为软交换SIP协议详解及应用
- Word2003长篇文档排版技巧解析
- SQL Server 2005 分区表与索引优化
- 专家视角:PHP模式、框架、测试及更多
- HTML, XHTML & CSS 初学者指南
- ARM嵌入式系统开发入门指南
- 数据挖掘:实用机器学习工具与技术
- EJB3.0实战教程:从入门到精通
