串级调速系统设计与SIMULINK仿真分析
版权申诉
64 浏览量
更新于2024-06-21
收藏 1.04MB PDF 举报
"PI调节器控制的双闭环串级调速系统的设计"
本文主要探讨的是基于PI调节器的双闭环串级调速系统的设计与实现。串级调速系统是电力拖动领域的一种重要调速方式,尤其适用于需要高效、高质量运行的现代工业生产环境。系统设计包括了多个关键环节,如系统组成、工作状态选择、动态模型建立、参数计算与调节器设计,以及仿真分析。
首先,双闭环串级调速系统由速度环和电流环两部分组成,其中速度环负责调整电机的整体转速,电流环则控制电机的转矩,确保系统的稳定性和快速响应。转子整流电路的工作状态选择直接影响系统的性能,需要根据实际需求和电机特性来确定。
接着,系统的动态数学模型是分析和设计的基础。通过建立异步电动机和转子直流回路的传递函数,可以深入理解系统动态行为,为后续的调节器参数计算提供依据。异步电动机的转子电动势和直流回路参数的计算是模型建立的关键步骤,这些参数直接影响到调速的精度和稳定性。
PI调节器在电流环和速度环中起着至关重要的作用。它结合了比例(P)控制的快速响应和积分(I)控制的稳态精度,能够有效地消除误差并保持系统稳定。调节器参数的计算与设计需要根据系统要求和动态模型来进行,以确保在各种工况下都能获得理想的调速效果。
SIMULINK作为MATLAB软件的一部分,常用于控制系统仿真。在串级调速系统的SIMULINK仿真中,可以模拟系统在不同条件下的动态响应,分析其性能指标,如上升时间、超调量、稳态误差等,为实际硬件实施提供指导。
总结全文,串级调速系统在现代工业自动化中扮演着重要角色,特别是对于那些需要灵活调速和高效率的场合。通过PI调节器的控制,串级调速可以实现无级平滑调速,并且具有较高的工作效率,特别是在绕线异步电动机中,通过转子回路引入附加电动势,能够将转差功率回馈至电网,进一步提升系统效率。同时,低成本自动化技术的发展也使得串级调速系统在中小型企业的应用变得更加普及和实用。
4
2.2 串级调速时转子整流电路工作状态的选择
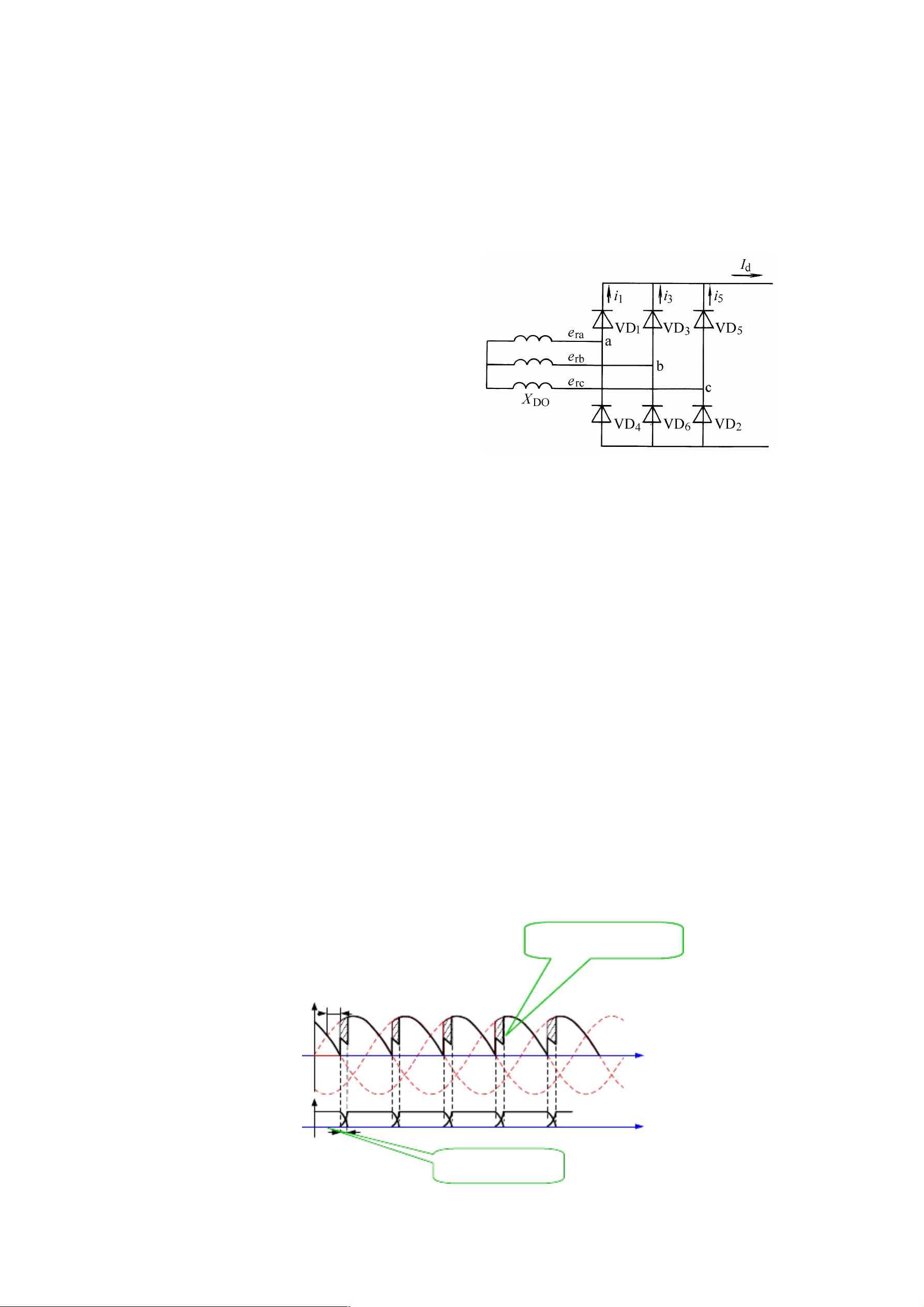
1.转子整流电路:(如图 2.3)
从图 2-1中可以看出,异步电动机相当
于转子整流器的供电电源。如果把电动
机定子看成是整流变压器的一次侧,则
转子绕组相当于二次侧,与带整流变压
器的整流电路非常相似,因而可以引用
电力电子技术中分析整流电路的一些结
论来研究串级调速时的转子整流电路。
图 2.3 转子整流电路
但是,两者之间还存在着一些显著的差异,主要是:整流电路的不同点:
(1)一般整流变压器输入输出的频率是一样的,而异步电动机转子绕组感应电动
势的幅值与频率都是变化的,随电机转速的改变而变化;
(2)异步电动机折算到转子侧的漏抗值也与转子频率或转差率有关;
(3)由于异步电动机折算到转子侧的漏抗值较大,所以出现的换相重叠现象比一
般整流电路严重,从而在负载较大时会引起整流器件的强迫延迟换相现象。
2. 电路分析:
假设条件:
(1)整流器件具有理想的整流特性,
管压降及漏电流均可忽略;
(2)转子直流回路中平波电抗器的
电感为无穷大,直流电流波形平直;
(3)忽略电动机励磁阻抗的影响。
换相重叠现象:
设电动机在某一转差率下稳定运行,转子三相的感应电动势为
ra
E
、
rb
E
、
rc
E
当各整流器件依次导通时,必有器件间的换相过程,这时处于换相中的两相电动
势同时起作用,产生换相重叠压降,如图 2.4所示。
u
d
i
d
tO
tO
i
c
i
a
i
b
i
c
i
a
I
d
u
a
u
b
u
c
换相重叠压降
换相重叠角
剩余15页未读,继续阅读
2008-12-25 上传
2023-05-30 上传
2021-10-04 上传
2021-10-12 上传
2021-09-29 上传
2021-09-29 上传

hhappy0123456789
- 粉丝: 72
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- JHU荣誉单变量微积分课程教案介绍
- Naruto爱好者必备CLI测试应用
- Android应用显示Ignaz-Taschner-Gymnasium取消课程概览
- ASP学生信息档案管理系统毕业设计及完整源码
- Java商城源码解析:酒店管理系统快速开发指南
- 构建可解析文本框:.NET 3.5中实现文本解析与验证
- Java语言打造任天堂红白机模拟器—nes4j解析
- 基于Hadoop和Hive的网络流量分析工具介绍
- Unity实现帝国象棋:从游戏到复刻
- WordPress文档嵌入插件:无需浏览器插件即可上传和显示文档
- Android开源项目精选:优秀项目篇
- 黑色设计商务酷站模板 - 网站构建新选择
- Rollup插件去除JS文件横幅:横扫许可证头
- AngularDart中Hammock服务的使用与REST API集成
- 开源AVR编程器:高效、低成本的微控制器编程解决方案
- Anya Keller 图片组合的开发部署记录
