
车辆的坡道阻力为
Fg=migsinθFg=migsinθ
(4)
综合式(1) ~ 式(4), 车辆的动力学模型表示为
{s˙i=vis¨i=v˙i=b1Fi−b2v2i−b3w{s˙i=vis¨i=v˙i=b1Fi−b2vi2−b3w
(5)
式
中, b1=1/mi,b1=1/mi, b2=CDρA/2mi,b2=CDρA/2mi, b3=g,b3=g, w=w=μcosθ+sinθ,μcosθ+
sinθ, ww 表示道路坡度和路面情况, 未知且不确定. 为方便研究, 往往假定道路情况不变,
忽略了道路坡度和路面变化的影响, 本文则将其视为系统的扰动项, 并通过控制器设计对其
观测补偿以更加符合实际情况, 同时也更能体现道路坡度对于 HEV 能量消耗的影响.
理想的车间距定义为
da=sq−si−li−kθda=sq−si−li−kθ
(6)
式中, dada 为理想的车间距, 即在当前车速下制动且能保证不与前车相撞的最小安全
距离; sqsq 表示前车的位置; lili 表示车辆的长度; k>0k>0 为坡度系数.
注 1. 文献中理想的车间距 dada 多采用固定值
[20, 27]
, 并不能很好地适应车速变化; 文
献[24, 28]基于车速变化设定 da,da, 但往往由于车速实时变化使安全距离不断变化, 从而影
响控制性能. 本文理想车间距 dada 基于道路限速决定, 通过智能交通系统获得当前道路限
速并依据限速确定安全车距, 使 dada 既不会频繁变动, 也更符合交通法规和实际情况. 同
时, 考虑坡度对安全距离的影响, 当 θ>0,θ>0, 即车辆爬坡时, 安全车距相应缩短; 当
θ<0,θ<0, 即车辆下坡时, 安全车距相应增加.
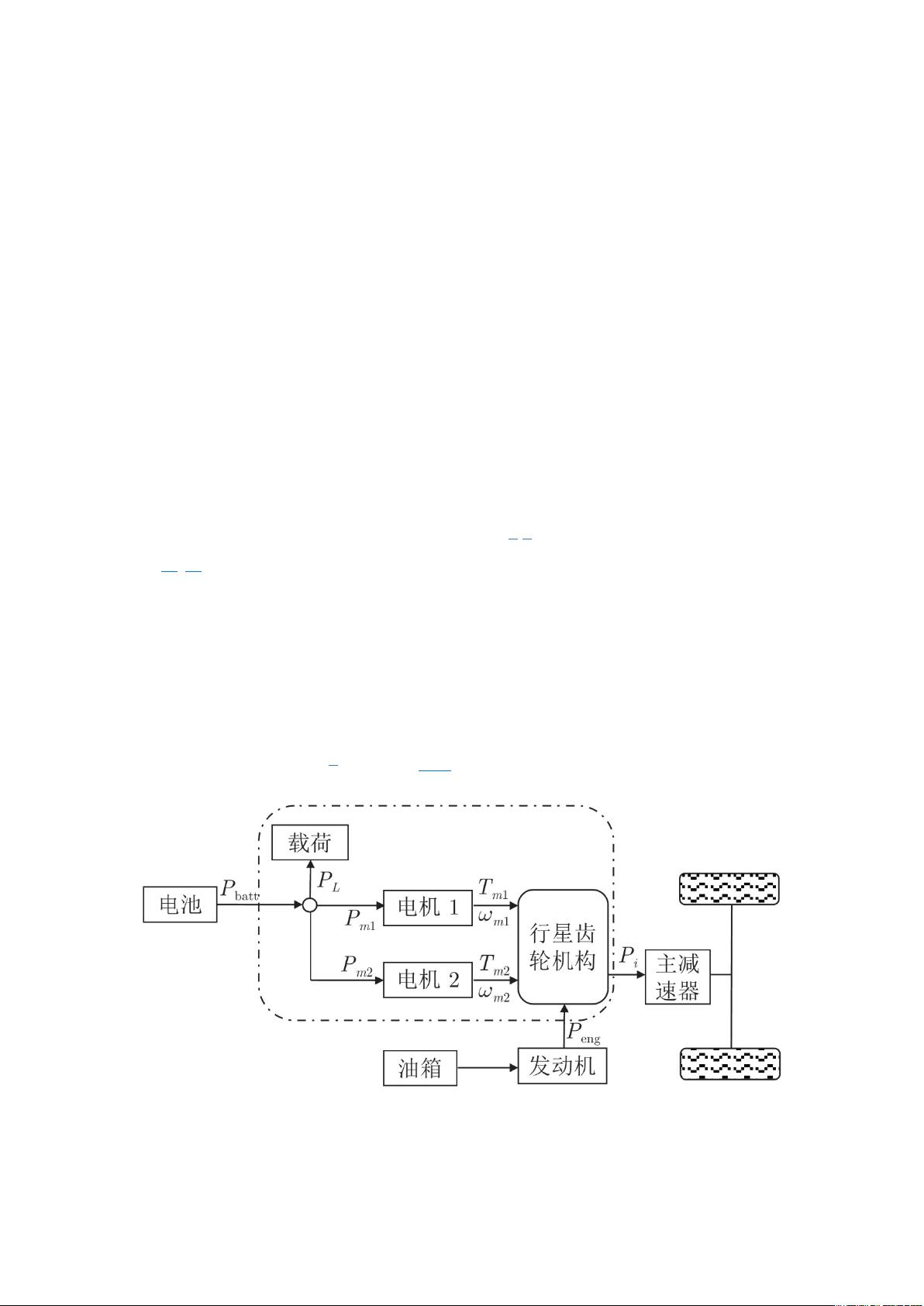
1.2 HEV 功率能量模型
考虑 Power-split HEV
[26]
, 其结构如图 2 所示, PLPL 指其他电器载荷, 从功率平衡的角
度, 车辆 i 的功率 PiPi 由电池功率和发动机功率共同提供, 即
图 2 Power-split HEV 功率关系
Fig. 2 Power-split HEV power relationship
剩余16页未读,继续阅读

罗伯特之技术屋
- 粉丝: 4392
- 资源: 1万+

下载权益

电子书特权

VIP文章

课程特权
开通VIP
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


