基于Raspberry Pi的银河系网络机器人系统设计
需积分: 0 4 浏览量
更新于2024-08-05
收藏 1.89MB PDF 举报
"NowLoading_設計書、システム説明図1"
本文将对NowLoading_設計書、システム説明図1进行详细的解读和分析,并生成相关知识点。
**系統概述**
NowLoading_設計書、システム説明図1是基于Linux操作系统的机器人系统,主要组成部分包括マスター側(Master Side)和スレーブ側(Slave Side)。マスター側是机器人的核心部分,包括Raspberry Pi单板计算机、3軸加速度センサ、エンコーダ、LED光源、ラズパイカメラモジュール等组件。スレーブ側则是机器人的执行部分,包括親ペンギンパペット、子ペンギン、移動機構等组件。
**マスター側の構成**
マスター側的主要组成部分包括:
* Raspberry Pi单板计算机:作为机器人的核心控制单元,运行Linux操作系统。
* 3軸加速度センサ:用于检测机器人的加速度和方向。
* エンコーダ:用于检测机器人的旋转角度和位置。
* LED光源:用于机器人的照明和指示。
* ラズパイカメラモジュール:用于机器人的视觉检测和图像处理。
**スレーブ側の構成**
スレーブ側的主要组成部分包括:
* 親ペンギンパペット:机器人的执行部分,负责机器人的移动和操作。
* 子ペンギン:机器人的子组件,负责机器人的具体执行。
* 移動機構:机器人的移动机构,负责机器人的移动和定位。
**システムの仕様**
システム的主要参数包括:
* サイズ:310×290×310[mm]
* 重量:マスターデバイス:0.2[kg]、スレーブロボット:1.8[kg]
* Sensor:3軸加速度センサ、エンコーダ、ラズパイカメラモジュール等
* 制御ユニット:Raspberry Pi单板计算机
* OS:Linux操作系统
**こだわりポイント**
こだわりポイント①:パペットを実際に付けているのと変わらない直感的な操作で、誰でも簡単にロボットを制御することができる。
こだわりポイント②:手首の傾き方向に合わせて直感的にロボットを移動させることができる。
**ロータリーエンコーダの仕様**
ロータリーエンコーダ的主要参数包括:
* エンコーダ種類:インクリメンタル形
* 分解能:360パルス/回転
* 出力相:A相、B相、Z相
* 電源電圧(V):DC12~24
* 慣性モーメント(kg・m2):1×10-7以下
* 起動トルク(mN・m):1以下
* 最高回転数(min-1[r.p.m]):5000
* 最大応答周波数(kHz):30
**3軸加速度センサの仕様**
3軸加速度センサ的主要参数包括:
* 電源電圧:DC3.3V(動作範囲:DC1.71V~DC3.6V)
* 消費電流:1mA(Vdd3V)
NowLoading_設計書、システム説明図1是一个基于Linux操作系统的机器人系统,具有先进的机器人技术和强大的操作能力。
P.1/5
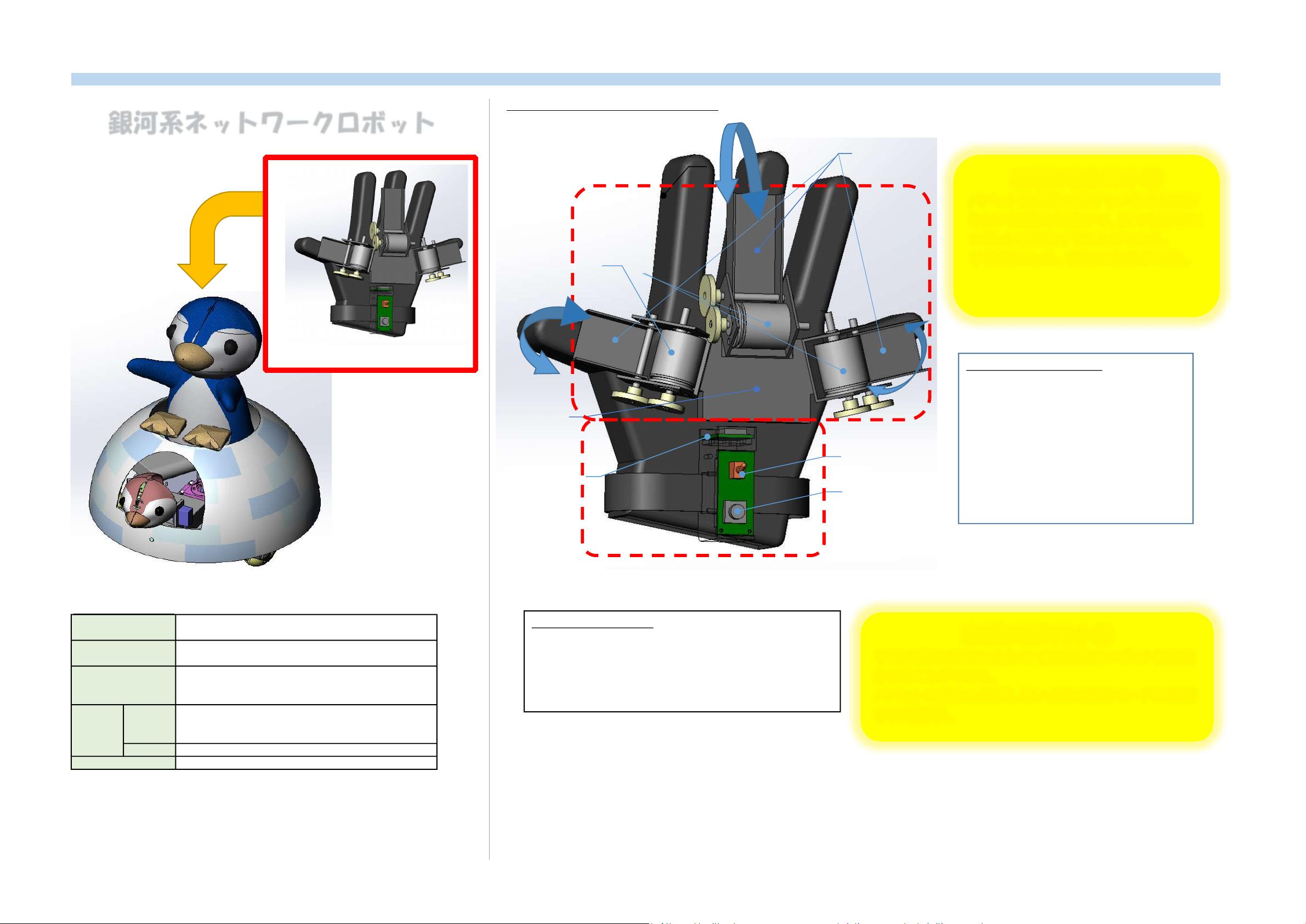
マスター側の構成(グローブ+リストバンド)
ロボットとしての仕様
サイズ
(高さ×幅×奥行)
3軸加速度センサ×1、エンコーダ×3
LED光源(緑)×1
ラズパイカメラモジュール
首:1、腕:1×2(L/R)、ひょっこり:1(親ペンギン)
首:1(子ペンギン)
並進:2、回転:1(移動機構)
モータ 8個
制御ユニット RaspberryPi(Linux OS)
設計書 システム構成図
310×290×310[mm]
自由度
重量
マスターデバイス:0.2[kg]
スレーブロボット:1.8[kg]
センサ
可動部
銀河系ネットワークロボット
スレーブ側
マスター側(操作デバイス)
こだわりポイント①
パペットを実際に付けているのと変わ
らない直感的な操作で、誰でも簡単に
ロボットを制御することができる。
手袋型のため、容易に着脱が可能。
こだわりポイント②
手首の傾き方向に合わせて直感的にロボットを移動
させることができる。
パペットの操作と混同しないように操作モードの切替
手段を搭載。
ロータリーエンコーダの仕様
エンコーダ種類:インクリメンタル形
分解能:360パルス/回転
出力相:A相、B相、Z相
電源電圧(V):DC12~24
慣性モーメント(kg・m2):1×10-7以下
起動トルク(mN・m[gfcm]):1以下
最高回転数(min-1[r.p.m]):5000
最大応答周波数(kHz):30
3軸加速度センサの仕様
電源電圧:DC3.3V(動作範囲:DC1.71V~DC3.6V)
消費電流:1mA(Vdd 3V)
ロータリー
エンコーダ×
3
ベース
可動板×
3
3軸加速度
センサ
トグル
SW
タクト
SW
リストバンドユニット
グローブユニット
下载后可阅读完整内容,剩余7页未读,立即下载
2022-08-08 上传
2024-10-23 上传

苗苗小姐
- 粉丝: 42
- 资源: 328
 我的内容管理
展开
我的内容管理
展开







最新资源
- 单片机串口通信仿真与代码实现详解
- LVGL GUI-Guider工具:设计并仿真LVGL界面
- Unity3D魔幻风格游戏UI界面与按钮图标素材详解
- MFC VC++实现串口温度数据显示源代码分析
- JEE培训项目:jee-todolist深度解析
- 74LS138译码器在单片机应用中的实现方法
- Android平台的动物象棋游戏应用开发
- C++系统测试项目:毕业设计与课程实践指南
- WZYAVPlayer:一个适用于iOS的视频播放控件
- ASP实现校园学生信息在线管理系统设计与实践
- 使用node-webkit和AngularJS打造跨平台桌面应用
- C#实现递归绘制圆形的探索
- C++语言项目开发:烟花效果动画实现
- 高效子网掩码计算器:网络工具中的必备应用
- 用Django构建个人博客网站的学习之旅
- SpringBoot微服务搭建与Spring Cloud实践
