ERDAS LPS无人机数据处理流程详解:高精度自动化解决方案
ERDAS LPS是一款专为无人机遥感数据处理而设计的强大软件,其在无人机操作流程中的关键作用体现在其高效、精确的数据处理能力上。无人机因其响应快速、机动灵活的特点,在应急减灾(如地震、泥石流、火灾和洪涝)、资源调查与监测(土地、矿产和环境)、测绘以及城市规划、考古等多个领域展现出广泛应用价值。然而,无人机数据也存在局限性,如飞行环境复杂性导致的定位信息不精确,非量测相机的使用以及相对较小的幅宽带来的大数据量挑战。
LPS处理无人机数据的具体流程可以分为以下几个步骤:
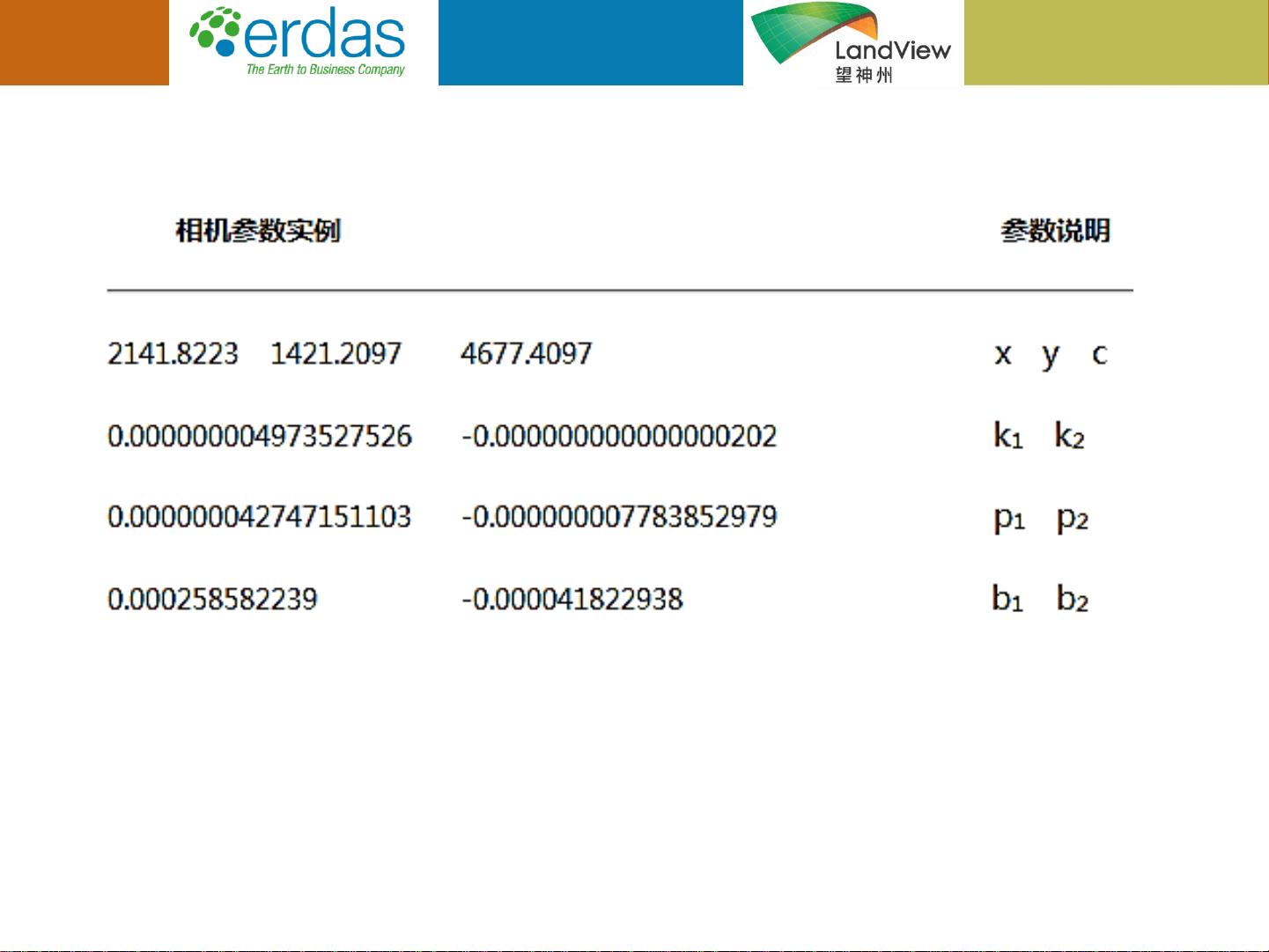
1. **原始数据与参数输入**:首先,需要收集原始的无人机影像数据,包括相机参数(如焦距、CCD尺寸、校验参数、像主点偏移等),以及POS(Positioning and Orientation System)数据,这些是后续处理的基础。
2. **创建工程**:在LPS中建立项目工程,用于组织和管理所有数据。
3. **数据导入与预处理**:将获取的原始数据导入LPS,然后创建数据金字塔,通过内定向技术纠正由于无人机飞行引起的图像扭曲。
4. **外方位元素导入**:引入航拍时的几何关系,以便于进一步的空三测量。
5. **提取DEM(数字高程模型)**:利用LPS的高精度算法,从影像中提取地形信息。
6. **空中三角测量**:执行空三测量,生成精确的三维空间模型。
7. **数据准备**:确保所有必要的控制点信息,如自动生成的同名点、添加的控制点和控制资料,以提高精度。
8. **空三成果与正射校正**:通过空三成果得到影像的空间坐标,然后进行正射校正,使影像与实际地面保持一致。
9. **影像镶嵌**:将多个影像拼接成连续的地理区域,形成DOM(数字正射影像)。
10. **成果输出**:最终输出DOM和DEM成果,供用户进行各种分析和应用。
在整个过程中,LPS通过自动化数据处理流程、并行分布式处理技术,显著提高了处理效率,同时通过精确的点量测、空三模型算法和地形提取算法,确保了处理结果的准确性。这些特性使得ERDAS LPS成为无人机遥感数据处理领域的首选工具,尤其适用于处理无人机在各种复杂场景下获取的大规模数据。

相关推荐

liema99
- 粉丝: 0
- 资源: 4
 我的内容管理
展开
我的内容管理
展开







最新资源
- npp_7.4.2_Installer.zip
- Mapquiz-Front
- 行业文档-设计装置-木丝水泥板为免脱模板的混凝土墙体缺陷检测探针.zip
- frontend-mentors-social-proof-section
- Adaptive-Kalman-Filter.rar_adaptive kalman_kalman_卡尔曼滤波_自适应 卡尔曼_
- 【容智iBot】6容智信息·Infodator数字化生产力供应商.rar
- webcomponents-material:可重用的Custom元素库
- matlab标注字体代码-SynthTextHindi:此仓库包含用于生成印地语合成文本图像的代码
- FindNet-IP.zip
- FreeJeweled-开源
- obscenity:Obscenity是RubyRubinius,Rails(通过ActiveModel)和Rack中间件的亵渎性过滤器
- TestNG_Allure_best
- 【容智iBot】5容智信息成功案例分享——柯尼卡美能达数字化生产力项目.rar
- [已归档]一个可以轻松保存和恢复Android组件状态的库。-Android开发
- worker:高性能Node.jsPostgreSQL作业队列(也适用于使PostgreSQL触发器生成的作业将函数触发到另一个工作队列中)
- 正弦电气 EM329A用户手册.zip
