高压线巡检机器人:结构设计与传统方式对比
版权申诉
10 浏览量
更新于2024-06-23
收藏 2.51MB DOC 举报
高压线巡检机器人是一种创新的解决方案,针对传统高压输电线路巡检方式存在的问题而设计。课题的研究背景主要在于电力线路在电力传输中的核心地位,其安全稳定性直接影响国家经济的发展。随着电力线路面临恶劣环境的考验,如机械载荷、污秽、雷击、极端天气等,传统的飞机巡检、车辆巡检和人工巡检方式都有其局限性。
飞机巡检虽然能提供广阔的视野,但依赖于专业设备和人员技术,且受天气、航空管制等因素制约,成本高昂,风险较大,难以大规模应用。车辆巡检则机动性强,成本较低,但受限于地面道路条件,难以深入复杂的地理环境。人工巡检虽然直观,但劳动强度大、效率低、准确性差,不适用于广泛的线路覆盖。
高压线巡检机器人正是为了解决这些痛点而设计。它通过集成先进的传感器、摄像头、无人机技术以及导航系统,实现远程、精确、高效的线路监测。机器人可以自主飞行或行驶在复杂的地形中,无需依赖人力,减轻了人工巡检的困难和风险。同时,通过搭载高级分析软件,机器人能够实时识别和分析线路状态,发现潜在问题,并生成报告,有助于提前预警和处理故障。
设计上,高压线巡检机器人可能包括以下几个关键部分:轻巧的机体结构,以适应高空和复杂环境;高清晰度摄像头和红外传感器,用于详细检测线路及其附件的状况;强大的数据处理和通信模块,确保实时传输和分析数据;以及智能决策系统,根据预设算法判断是否需要维修或更换部件。此外,机器人的能源供应也是一个重要的考虑因素,可能采用太阳能、电池或者混合动力系统,确保长时间的续航能力。
总结来说,高压线巡检机器人的出现是电力行业向智能化、高效化转型的重要标志,它有望显著提高线路巡检的效率和安全性,降低维护成本,对于保障电力系统的稳定运行具有重要意义。
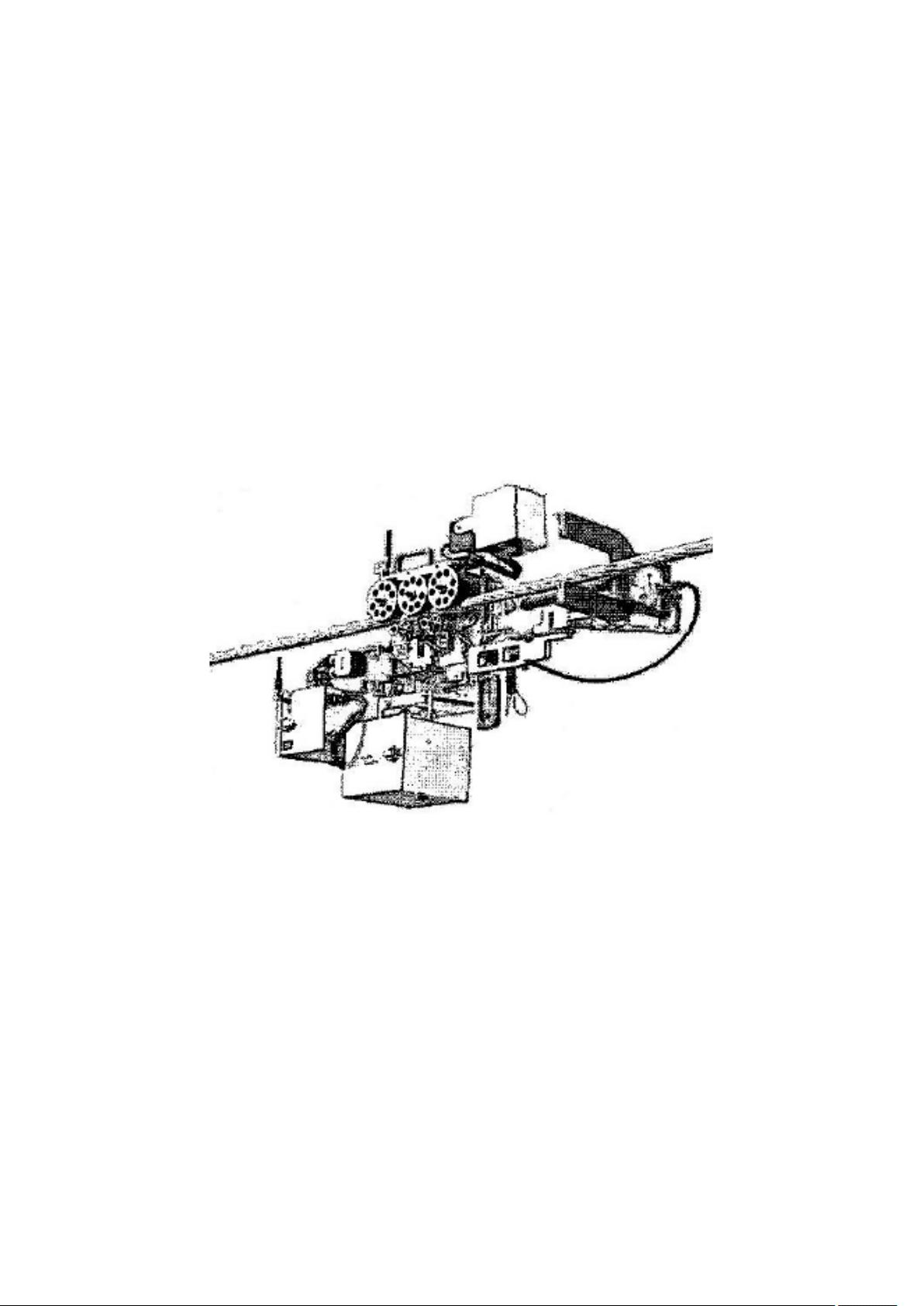
加拿大魁北克水电研究院的 Serge Montambault 等人 2000 年开始了 HQ
LineROVer 遥控小车的研制工作,如图 1-9 所示。该机器人起初用于清除输电
线上的积冰,逐渐发展为用于线路巡检、维护等多用途移动平台。第三代原型
机结构紧凑,仅重 25 千克,驱动力大,抗电磁干扰能力强,能爬 52°的坡,通
信距离可达 1 千米。小车采用灵活的模块化结构,安装不同的工作头即可完成
架空线视觉和红外检查、压接头状态评估、导线和底线更换、导线清污和除冰
带电作业,已在工作电流为 800A 的 315KV 电力线上进行了多次现场测试。但
是,HQ LineROVer 无越障能力,只能在两线塔之间的电力线上工作。目前,研
究组正在开发具有越障功能的自治移动小车,实验结果表明,新一代 HQ
LineROVer 能在无人干预的情况下跨越障碍物,巡检范围达 4KM。
.
图 1-9 HQ LineROVer 遥控小车
Fig.1-9 HQ LineROVer
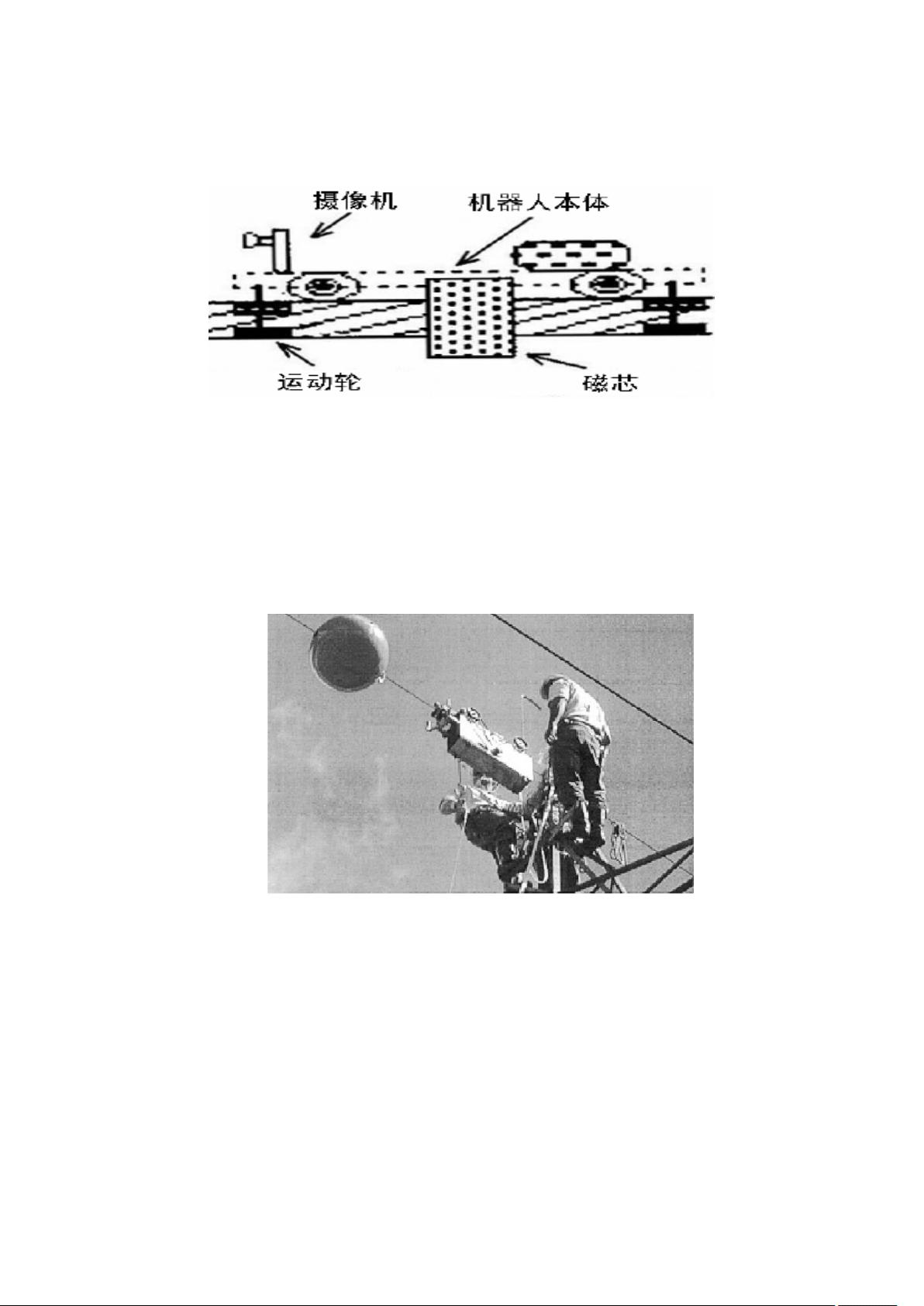
泰国 King Mongkut’s University of Technology Thonburi 的 S.Peungsungwal
等人 2001 年设计了一台自给电巡检机器人原型,如图 1-10 所示。该机器人采
用电流互感器从爬行的电力线路上获取感应电流,作为机器人的工作电源,从
而解决了巡检机器人长时间驱动的动力问题,并初步实现了根据摄像机图像判
断电力线上绝缘子等障碍物位置的视觉导航功能。不过,该试验型巡检机器人
仅能在两线塔间的电力线上爬行,无越障能力。
剩余41页未读,继续阅读
2021-08-12 上传
2023-08-23 上传
2021-08-24 上传
2023-04-03 上传
2023-12-19 上传
2023-04-03 上传
2023-07-23 上传
2023-11-24 上传
2023-06-02 上传

omyligaga
- 粉丝: 87
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
