集装箱波纹板焊接机器人运动学分析与结构设计
版权申诉
52 浏览量
更新于2024-06-23
收藏 4.95MB DOC 举报
"集装箱波纹板焊接机器人机构运动学分析及车体结构设计"
这篇文档主要探讨了集装箱波纹板焊接机器人的设计与运动学分析,旨在解决现有焊接自动化水平低下的问题,提升焊接质量和生产效率。文档分为多个章节,详细阐述了研究的各个关键方面。
1.1 选题的依据及意义
选题基于当前集装箱波纹板焊接中存在的问题,即焊枪无法根据波纹板形状调整与焊枪速度的夹角,导致不同区域的焊缝质量不一。通过设计三自由度焊接机器人并进行运动学分析,可以确保焊枪在直线段与波形斜边段都能保持与焊缝垂直,从而提高焊缝一致性,提升整体生产质量。
1.2 研究现状及发展趋势
当前,移动焊接机器人技术在不断提升,尤其在大型结构件现场焊接中应用广泛。本课题不仅关注移动焊接机器人的发展,还涉及结构设计和运动学分析方法的最新进展。随着工业4.0和智能制造的推进,焊接自动化技术将更加先进,对机器人的灵活性和智能化要求也将更高。
2. 焊接机器人机构运动学分析
这部分详细介绍了运动学分析的基础理论——齐次变换(D-H变换),并逐步展示了如何建立变换方程、进行运动学分析处理以及求解逆解过程。这些分析对于理解机器人关节运动和确定焊枪精确位置至关重要。
3. 结构设计
文档深入讨论了小车行走结构设计,包括如何选择适合的摆动关节电机,以确保机器人在复杂工况下仍能稳定运行。结构设计部分是实现机器人功能的关键,关系到机器人的稳定性、效率和使用寿命。
总结,这篇文档全面地涵盖了集装箱波纹板焊接机器人的设计思路,从运动学分析到具体结构实施,提供了理论与实践相结合的解决方案。这样的研究有助于推动焊接自动化技术的进步,提升集装箱制造行业的生产质量和效率。
11
A
=
�
�
�
�
�
�
�
�
�
�
333231
232221
131211
aaa
aaa
aaa
(2.2)
12
A
=(
x
p
,
y
p
,
z
p
)
T
(2.3)
式(2.2)表示活动坐标系在参考系中的方向余旋阵,即坐标变换中的旋转量;而式
(2.3)表示活动坐标系原点在参考系中的位置,即坐标变换中的平移量。
特殊情况有平移变换和旋转变换:
平移变换:
TransH �
(
c,b,a
) =
�
�
�
�
�
�
�
�
�
�
�
�
1000
c100
b010
a001
(2.4)
旋转变换:
Rot
(
�
,z
) =
�
�
�
�
�
�
�
�
�
�
�
�
�
1000
0100
00cossin
00sincos
��
��
(2.5)
2.2 变换方程的建立
2.2.1 机构运动原理
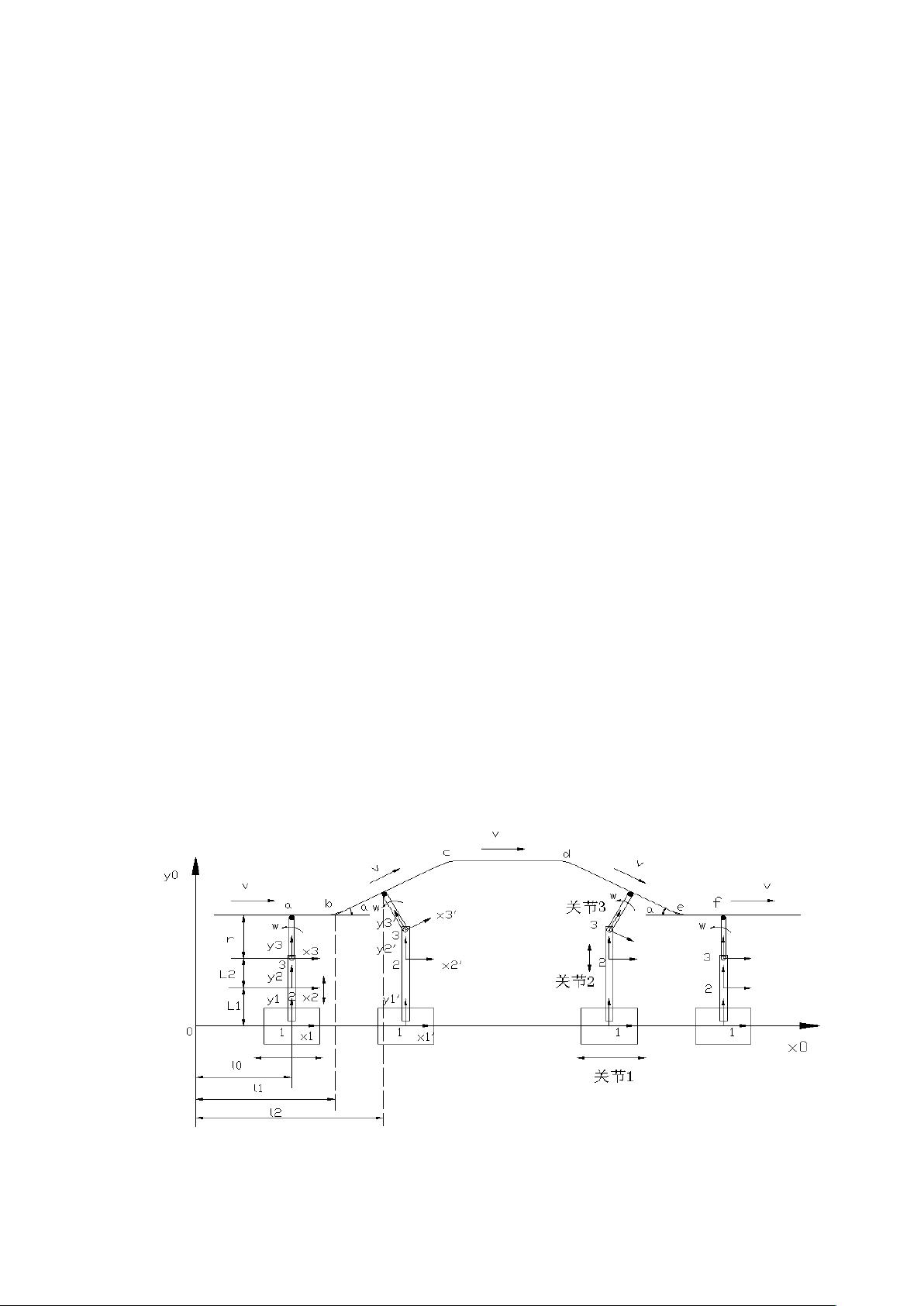
如图 2.1 所示,机器人采用三个运动关节:左右平移的焊接机器人本体 1,前后
平移的十字滑块和做旋转运动的末端效应器 3。通过三个关节之间的协调运动,来保
证末端效应器的姿态发生变化时,焊接速度保持不变,焊枪与焊缝间的夹角保持垂直
关系,来做到直线段与波内斜边段焊缝成形的一致。
图 2.1 三自由度焊接机器人运动简图(俯视图)
2.2.2 运动学模型

剩余40页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-10-11 上传
2021-08-23 上传
2023-09-22 上传
2021-08-23 上传
2023-09-22 上传

omyligaga
- 粉丝: 101
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
