发那科机器人喷涂系统接口与工件信息管理详解
版权申诉
发那科机器人喷涂系统界面介绍的PPT详细阐述了该系统的操作流程和功能特性。主要内容分为以下几个部分:
1. 数据交互接口:上件区(HTC与机器人PLC通信)中,工件信息如滑撬号、车型代码(字符数组)、喷涂信号等,通过DP/DPCOUPLER传递。字符数组需要转换为整数形式,以便机器人PLC处理。
2. 工件信息管理:PLC负责接收、存储和检索工件信息,包括滑撬号、车型代码和颜色代码。这些信息以字符数组形式存储,可通过车型设置、颜色设置界面进行管理和对应关系配置。
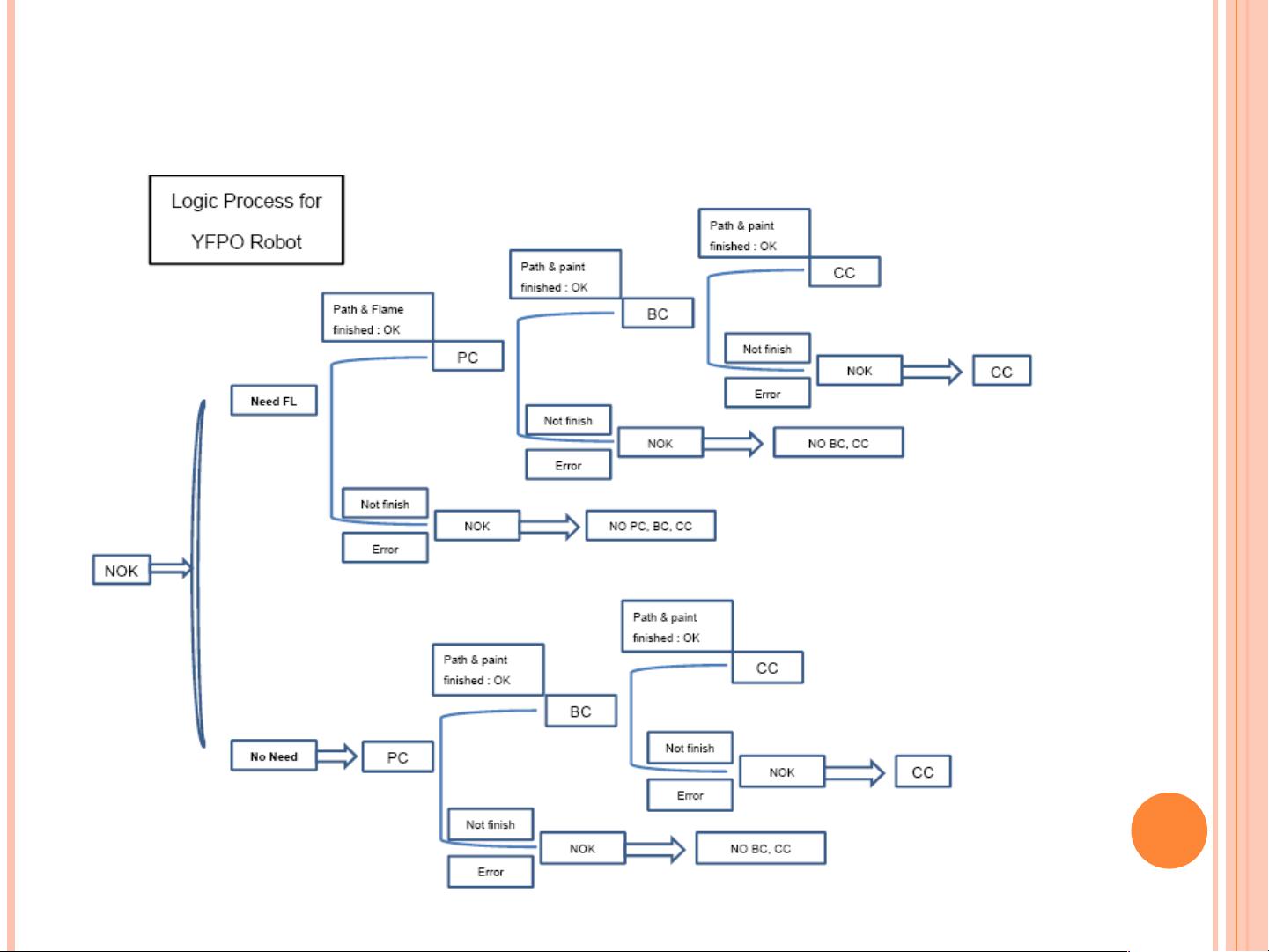
3. 喷涂逻辑控制:PLC根据数据库中的喷涂状态,决定是否执行下一环节的喷涂任务。节距时间的调整是自动化的,根据车型、换色时间和清洗频次进行计算。
4. 节距设置界面:有专门的界面允许用户设置不同车型的节距时间、换色节距时间和清洗频次节距时间,这有助于精确控制喷涂流程。
5. 清洗功能:用户可以根据小车数量、车型或颜色选择不同的清洗方式。PLC在接收到工件信息后,根据HMI上的设置控制机器人进行频次清洗。机器人在接到manualenable信号后进入伪自动模式,并执行清洗循环。
6. HMI界面设计:系统采用直观易用的HMI界面,用户可以方便地在车型设置、颜色设置和清洗频次设置界面进行参数调整,确保了操作的灵活性和效率。
7. 注意事项:当换色和频次清洗同时启用时,系统会优先处理换色操作,清洗频次设置需遵循特定的逻辑顺序。
总结来说,这个PPT教程旨在详细介绍发那科机器人喷涂系统的操作界面及其背后的逻辑,帮助用户理解和掌握如何有效地管理和控制喷涂过程,提高生产效率和质量。通过学习和实践这些内容,操作人员能够更好地利用该系统进行精细化喷涂作业。
剩余26页未读,继续阅读
2022-07-10 上传
2022-06-30 上传
2021-09-17 上传
2023-09-11 上传
2023-09-22 上传
2022-07-10 上传
2020-12-18 上传

wuxingqun1975
- 粉丝: 0
- 资源: 5万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 全国江河水系图层shp文件包下载
- 点云二值化测试数据集的详细解读
- JDiskCat:跨平台开源磁盘目录工具
- 加密FS模块:实现动态文件加密的Node.js包
- 宠物小精灵记忆配对游戏:强化你的命名记忆
- React入门教程:创建React应用与脚本使用指南
- Linux和Unix文件标记解决方案:贝岭的matlab代码
- Unity射击游戏UI套件:支持C#与多种屏幕布局
- MapboxGL Draw自定义模式:高效切割多边形方法
- C语言课程设计:计算机程序编辑语言的应用与优势
- 吴恩达课程手写实现Python优化器和网络模型
- PFT_2019项目:ft_printf测试器的新版测试规范
- MySQL数据库备份Shell脚本使用指南
- Ohbug扩展实现屏幕录像功能
- Ember CLI 插件:ember-cli-i18n-lazy-lookup 实现高效国际化
- Wireshark网络调试工具:中文支持的网口发包与分析
