深度增强:自动驾驶中基于伪激光雷达的3D目标检测
下载需积分: 32 | PDF格式 | 6.68MB |
更新于2024-07-09
| 177 浏览量 | 举报
"这篇论文是关于在自动驾驶中利用伪激光雷达(Pseudo-LiDAR)进行精确3D物体检测的研究,发表于ICLR 2020年会议。研究团队来自康奈尔大学和俄亥俄州立大学,旨在通过改进立体图像的深度估计,提高伪激光雷达技术的性能,尤其是对于远距离物体的探测精度,从而弥补与昂贵的LiDAR传感器之间的性能差距。他们还探讨了利用额外的图像信息来增强伪激光雷达效果的可能性。"
在自动驾驶领域,3D物体检测是不可或缺的关键技术,主要用于识别车辆、行人等目标。传统的解决方案依赖于高成本的LiDAR(光探测和测距)传感器,以获取精确的深度信息。然而,近期出现的伪激光雷达技术提供了一种成本更低的替代方案,它基于立体图像生成类似LiDAR的深度信息。
尽管伪激光雷达展现出了潜力,但其在远距离物体检测上的准确性仍然不足,这是当前的主要挑战。论文作者针对这一问题,对立体网络架构和损失函数进行了适应性调整,以更好地匹配精确深度估计的需求,尤其是针对远处物体。这表明他们可能对网络结构进行了优化,增强了对远距离特征的捕获能力,并调整了损失函数,使得网络更加关注远处物体的深度预测。
此外,研究人员还探索了如何利用额外的图像信息来增强伪激光雷达的效果。这可能包括利用颜色、纹理或其他视觉特性来辅助深度估计,以提高整体的3D检测精度。这种融合不同信息源的方法可以提高对复杂场景的理解,进一步缩小伪激光雷达与真实LiDAR在性能上的差距。
这篇论文贡献了对伪激光雷达技术的重要改进,提升了自动驾驶中的3D物体检测能力,特别是在远距离物体的检测上,为实现更经济且高效的自动驾驶系统提供了新的思路。这些研究成果对于推动自动驾驶技术的发展,降低技术成本,以及提高道路安全具有重要意义。
Published as a conference paper at ICLR 2020
Depth
Correction
Corrected Pseudo-LiDAR Point CloudSparse LiDAR Point Cloud
Dense Pseudo-LiDAR Point Cloud
KNN
graph
Weight Sharing
Feature
Extractor
left
feature
map
right
feature
map
3D conv
softmax
Disparity
Cost
Volume
Convert
Depth
Cost
Volume
Dense Predicted Depth Map
Feature
Extractor
Left Image
I
l
<latexit sha1_base64="ac35sPpnobXhLFI3vIXtMm+1InU=">AAAB6nicbVDLSgNBEOzxGRMfMR69DEYhp7AbD3qSgBe9RTQPSJYwO5lNhszOLjOzQljiF+jFgxK8+kXe/Bsnj4MmFjQUVd10d/mx4No4zjdaW9/Y3NrO7GRzu3v7B/nDQkNHiaKsTiMRqZZPNBNcsrrhRrBWrBgJfcGa/vB66jcfmdI8kg9mFDMvJH3JA06JsdL9bVd080Wn7MyAV4m7IMVqYfL8VDrN1br5r04voknIpKGCaN12ndh4KVGGU8HG2U6iWUzokPRZ21JJQqa9dHbqGJ9ZpYeDSNmSBs/U3xMpCbUehb7tDIkZ6GVvKv7ntRMTXHopl3FimKTzRUEisInw9G/c44pRI0aWEKq4vRXTAVGEGptO1obgLr+8ShqVsntertzZNK5gjgwcwwmUwIULqMIN1KAOFPrwAm/wjgR6RRP0MW9dQ4uZI/gD9PkDNQyP9A==</latexit>
Right Image
I
r
<latexit sha1_base64="emBOe26klE0Zw/kQRczFLd//sRU=">AAAB6nicbVDLSgNBEOzxGRMfMR69DEYhp7AbD3qSgBe9RTQPSJYwO5lNhszOLjOzQljiF+jFgxK8+kXe/Bsnj4MmFjQUVd10d/mx4No4zjdaW9/Y3NrO7GRzu3v7B/nDQkNHiaKsTiMRqZZPNBNcsrrhRrBWrBgJfcGa/vB66jcfmdI8kg9mFDMvJH3JA06JsdL9bVd180Wn7MyAV4m7IMVqYfL8VDrN1br5r04voknIpKGCaN12ndh4KVGGU8HG2U6iWUzokPRZ21JJQqa9dHbqGJ9ZpYeDSNmSBs/U3xMpCbUehb7tDIkZ6GVvKv7ntRMTXHopl3FimKTzRUEisInw9G/c44pRI0aWEKq4vRXTAVGEGptO1obgLr+8ShqVsntertzZNK5gjgwcwwmUwIULqMIN1KAOFPrwAm/wjgR6RRP0MW9dQ4uZI/gD9PkDPiSP+g==</latexit>
h
l
<latexit sha1_base64="Nd9wGqAnyDkpEBh0VAa7gM/R0VQ=">AAAB6nicbVDLTgJBEOzFF4IPxKOXiWjCieziQU+GxItHjPJIYENmh1mYMDuzmZk1IRv8Ar140BCvfpE3/8bhcVCwkk4qVd3p7gpizrRx3W8ns7G5tb2T3c3l9/YPDgtHxaaWiSK0QSSXqh1gTTkTtGGY4bQdK4qjgNNWMLqZ+a1HqjST4sGMY+pHeCBYyAg2Vrof9nivUHIr7hxonXhLUqoVp89P5bN8vVf46vYlSSIqDOFY647nxsZPsTKMcDrJdRNNY0xGeEA7lgocUe2n81Mn6NwqfRRKZUsYNFd/T6Q40nocBbYzwmaoV72Z+J/XSUx45adMxImhgiwWhQlHRqLZ36jPFCWGjy3BRDF7KyJDrDAxNp2cDcFbfXmdNKsV76JSvbNpXMMCWTiBUyiDB5dQg1uoQwMIDOAF3uDd4c6rM3U+Fq0ZZzlzDH/gfP4AZEaQEw==</latexit>
h
r
<latexit sha1_base64="+h3HGUomtKmMBqcbNGjX0uzF+Hk=">AAAB6nicbVDLTgJBEOzFF4IPxKOXiWjCieziQU+GxItHjPJIYENmh1mYMDuzmZk1IRv8Ar140BCvfpE3/8bhcVCwkk4qVd3p7gpizrRx3W8ns7G5tb2T3c3l9/YPDgtHxaaWiSK0QSSXqh1gTTkTtGGY4bQdK4qjgNNWMLqZ+a1HqjST4sGMY+pHeCBYyAg2Vrof9lSvUHIr7hxonXhLUqoVp89P5bN8vVf46vYlSSIqDOFY647nxsZPsTKMcDrJdRNNY0xGeEA7lgocUe2n81Mn6NwqfRRKZUsYNFd/T6Q40nocBbYzwmaoV72Z+J/XSUx45adMxImhgiwWhQlHRqLZ36jPFCWGjy3BRDF7KyJDrDAxNp2cDcFbfXmdNKsV76JSvbNpXMMCWTiBUyiDB5dQg1uoQwMIDOAF3uDd4c6rM3U+Fq0ZZzlzDH/gfP4AbV6QGQ==</latexit>
C
disp
<latexit sha1_base64="0UTOjvAXMEJksx/hVAkO9/WjhJo=">AAAB9HicbVA7SwNBEN7zGeMrammzGgSrcBcLrSSQxjKCeUByhL29SbJk7+HuXDQcKaytxcZCEVt/jJ3/xs2j0MQPBj6+b4aZ+bxYCo22/W0tLa+srq1nNrKbW9s7u7m9/ZqOEsWhyiMZqYbHNEgRQhUFSmjECljgSah7/fLYrw9AaRGFNziMwQ1YNxQdwRkayS23Wwj3mPpCx6N2Lm8X7AnoInFmJF86upOP5aeHSjv31fIjngQQIpdM66Zjx+imTKHgEkbZVqIhZrzPutA0NGQBaDedHD2iJ0bxaSdSpkKkE/X3RMoCrYeBZzoDhj09743F/7xmgp0LNxVhnCCEfLqok0iKER0nQH2hgKMcGsK4EuZWyntMMY4mp6wJwZl/eZHUigXnrFC8Nmlckiky5JAck1PikHNSIlekQqqEk1vyTF7JmzWwXqx362PaumTNZg7IH1ifP32HlYs=</latexit>
C
depth
<latexit sha1_base64="GkKr4lOisyHRnKH92XrPamM93Wk=">AAAB9XicbVA9SwNBEN3zM8avqKXNaRCswl0stJJAGssI5gOSM+ztTZIle3vH7pwxHCmsrQUbC0Vs/S92/hs3H4UmPhh4vDfDzDw/Flyj43xbS8srq2vrmY3s5tb2zm5ub7+mo0QxqLJIRKrhUw2CS6giRwGNWAENfQF1v18e+/U7UJpH8gaHMXgh7Ure4YyikW7L7RbCPaYBxNgbtXN5p+BMYC8Sd0bypaOBeCw/PVTaua9WELEkBIlMUK2brhOjl1KFnAkYZVuJhpiyPu1C01BJQ9BeOrl6ZJ8YJbA7kTIl0Z6ovydSGmo9DH3TGVLs6XlvLP7nNRPsXHgpl3GCINl0UScRNkb2OAI74AoYiqEhlClubrVZjyrK0ASVNSG48y8vklqx4J4VitcmjUsyRYYckmNySlxyTkrkilRIlTCiyDN5JW/WwHqx3q2PaeuSNZs5IH9gff4AQOuV+g==</latexit>
Z
<latexit sha1_base64="Os4sBqyRMZjol0WZQqJOURH20t0=">AAAB6HicdVDLSgNBEJyNrxhfUY9eBoPgadmNhyQnA3rwmIB5YLKE2UknGTM7u8zMCmHJF3jxoEg8+jdevfk3ziYKPgsaiqpuurr9iDOlHefNyiwtr6yuZddzG5tb2zv53b2mCmNJoUFDHsq2TxRwJqChmebQjiSQwOfQ8sdnqd+6AalYKC71JAIvIEPBBowSbaT6VS9fcOzKScUtl/Bv4trOHIXTl1mKp1ov/9rthzQOQGjKiVId14m0lxCpGeUwzXVjBRGhYzKEjqGCBKC8ZB50io+M0seDUJoSGs/VrxMJCZSaBL7pDIgeqZ9eKv7ldWI9KHsJE1GsQdDFokHMsQ5xejXuMwlU84khhEpmsmI6IpJQbX6TM0/4vBT/T5pF2z2xi3WnUD1HC2TRATpEx8hFJVRFF6iGGogiQLfoHj1Y19ad9WjNFq0Z62NmH32D9fwOka2R7g==</latexit>
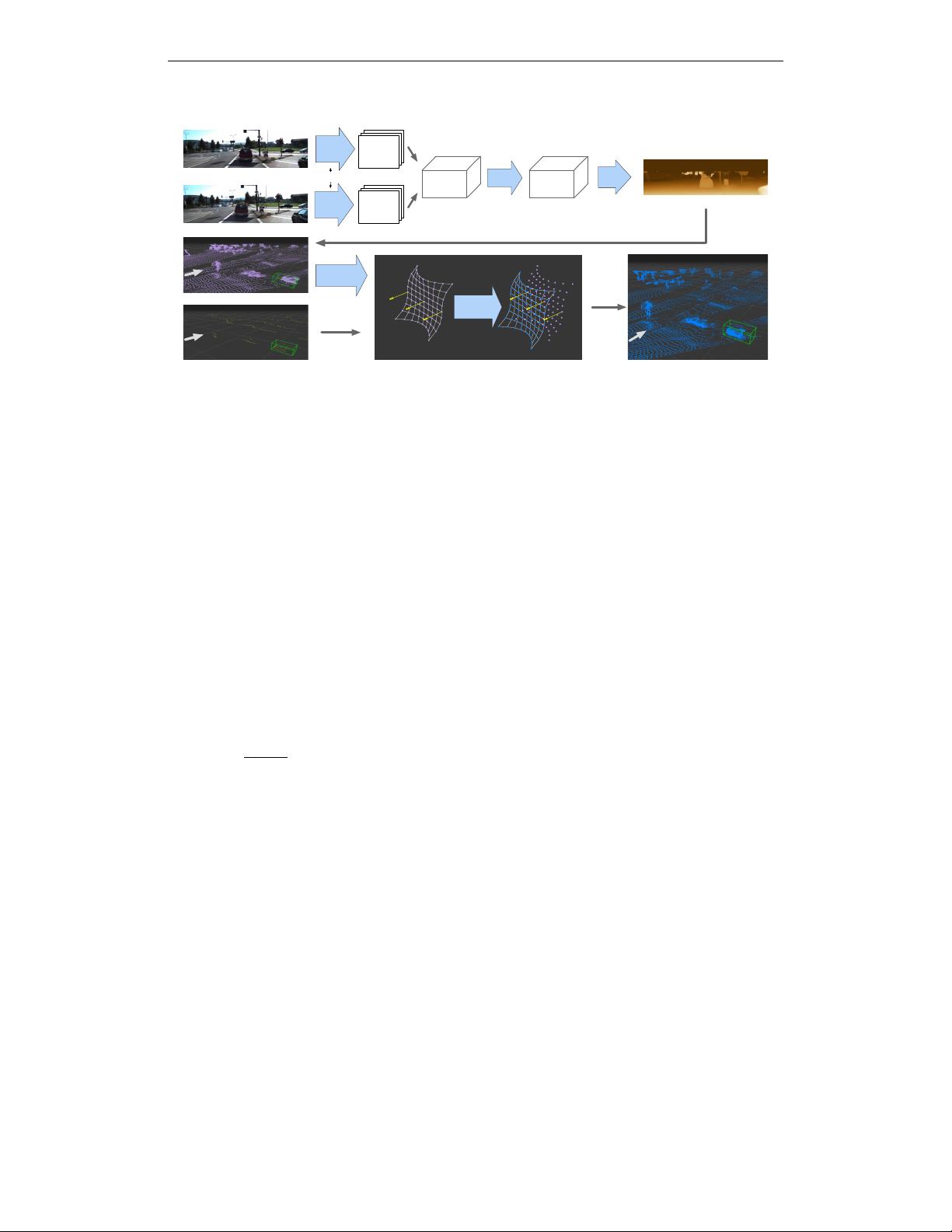
Figure 5:
The whole pipeline of improved stereo depth estimation:
(top) the stereo depth network (SDN)
constructs a depth cost volume from left-right images and is optimized for direct depth estimation; (bottom) the
graph-based depth correction algorithm (GDC) refines the depth map by leveraging sparser LiDAR signal. The
gray arrows indicates the observer’s view point. We superimpose the (green) ground-truth 3D box of a car, the
same one in Figure 1. The corrected points (blue; bottom right) are perfectly located inside the ground truth box.
throughout — which is clearly violated by the reciprocal depth to disparity relation (Figure 2). For
example, it may be completely appropriate to locally smooth two neighboring pixels with disparity
85 and 86 (changing the depth by a few cm to smooth out a surface), whereas applying the same
kernel for two pixels with disparity 5 and 6 could easily move the 3D points by 10m or more.
Taking this insight and the central assumption of convolutions — all neighborhoods can be operated
upon in an identical manner — into account, we propose to instead construct the depth cost volume
C
depth
, in which
C
depth
(u, v, z, :)
will encode features describing how likely the depth
Z(u, v)
of
pixel
(u, v)
is
z
. The subsequent 3D convolutions will then operate on the grid of depth, rather than
disparity, affecting neighboring depths identically, independent of their location. The resulting 3D
tensor S
depth
is then used to predict the pixel depth similar to Equation 3
Z(u, v) =
X
z
softmax(−S
depth
(u, v, z)) × z.
We construct the new depth volume,
C
depth
, based on the intuition that
C
depth
(u, v, z, :)
and
C
disp
u, v,
f
U
× b
z
, :
should lead to equivalent “cost”. To this end, we apply a bilinear interpolation
to construct
C
depth
from
C
disp
using the depth-to-disparity transform in Equation 2. Specifically, we
consider disparity in the range of
[0, 191]
following PSMNet (Chang & Chen, 2018), and consider
depth in the range of
[1m, 80m]
and set the grid of depth in
C
depth
to be 1m. Figure 5 (top) depicts
our stereo depth network (SDN) pipeline. Crucially, all convolution operations are operated on
C
depth
exclusively. Figure 4 compares the median values of absolute depth estimation errors using
the disparity cost volume (i.e., PSMNet) and the depth cost volume (SDN) (see subsection D.5 for
detailed numbers). As expected, for faraway depth, SDN leads to drastically smaller errors with only
marginal increases in the very near range (which disparity based methods over-optimize). See the
appendix for the detailed setup and more discussions.
4 DEPTH CORRECTION
Our SDN significantly improves depth estimation and more precisely renders the object contours
(see Figure 3). However, there is a fundamental limitation in stereo because of the discrete nature of
pixels: the disparity, being the difference in the horizontal coordinate between corresponding pixels,
has to be quantized at the level of individual pixels while the depth is continuous. Although the
quantization error can be alleviated with higher resolution images, the computational depth prediction
cost scales cubically with resolution— pushing the limits of GPUs in autonomous vehicles.
We therefore explore a hybrid approach by leveraging a cheap LiDAR with extremely sparse (e.g.,
4 beams) but accurate depth measurements to correct this bias. We note that such sensors are too
5
剩余21页未读,继续阅读
相关推荐

523 浏览量


潜夙
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握PerfView:高效配置.NET程序性能数据
- SQL2000与Delphi结合的超市管理系统设计
- 冲压模具设计的高效拉伸计算器软件介绍
- jQuery文字图片滚动插件:单行多行及按钮控制
- 最新C++参考手册:包含C++11标准新增内容
- 实现Android嵌套倒计时及活动启动教程
- TMS320F2837xD DSP技术手册详解
- 嵌入式系统实验入门:掌握VxWorks及通信程序设计
- Magento支付宝接口使用教程
- GOIT MARKUP HW-06 项目文件综述
- 全面掌握JBossESB组件与配置教程
- 古风水墨风艾灸养生响应式网站模板
- 讯飞SDK中的音频增益调整方法与实践
- 银联加密解密工具集 - Des算法与Bitmap查看器
- 全面解读OA系统源码中的权限管理与人员管理技术
- PHP HTTP扩展1.7.0版本发布,支持PHP5.3环境
