移动机器人技术:运动学、控制与传感器融合解析
需积分: 0 129 浏览量
更新于2024-08-05
收藏 2.06MB PDF 举报
"移动机器人复习笔记1"
移动机器人的研究涉及多个关键领域,包括自由度分析、运动学模型、控制器设计、传感技术及其误差模型。本复习笔记主要聚焦于实际考试会考察的内容,如自由度分析、运动学模型、极坐标控制器设计、传感器融合以及定位原理。
移动机器人的自由度分析是理解其运动能力的基础,它涉及到机器人的关节数目和可独立运动的部件。这一部分可能涵盖机器人的结构设计和运动范围。
运动学模型是描述机器人在不同坐标系下运动关系的数学表达,对于移动机器人,极坐标控制器设计显得尤为重要,因为这种设计方式可以帮助机器人在复杂环境中精确移动。极坐标控制系统通常考虑机器人的位置和方向,通过调整这些参数实现精确导航。
在传感技术方面,里程计是移动机器人常用的一种导航传感器,但它的误差模型需要被理解和补偿。光电传感器的使用也至关重要,它们可以用于检测环境中的物体和障碍物。里程计误差模型的推导涉及到统计方法,比如最小二乘法,用于拟合和校正数据。而传感器融合技术,例如将里程计数据与激光雷达数据结合,可以提高机器人的定位精度。
最小二乘法是数据分析中常见的优化方法,旨在找到最佳拟合曲线或直线,使得数据点与拟合曲线之间的误差平方和最小。在定位问题中,它可以用来确定机器人在环境中的位置。例如,通过三角化方法和矩阵形式的最小二乘法,可以解决多传感器数据融合下的定位问题。
提取线和面特征是移动机器人环境感知的重要部分,其中包括Split-and-merge算法,通过迭代寻找最佳拟合线;line-regression利用滑动窗口进行线性拟合;RANSAC算法用于剔除异常点并确定数据的最佳模型;霍夫变换则在图像处理中用于检测直线,将图像空间的直线映射到参数空间。
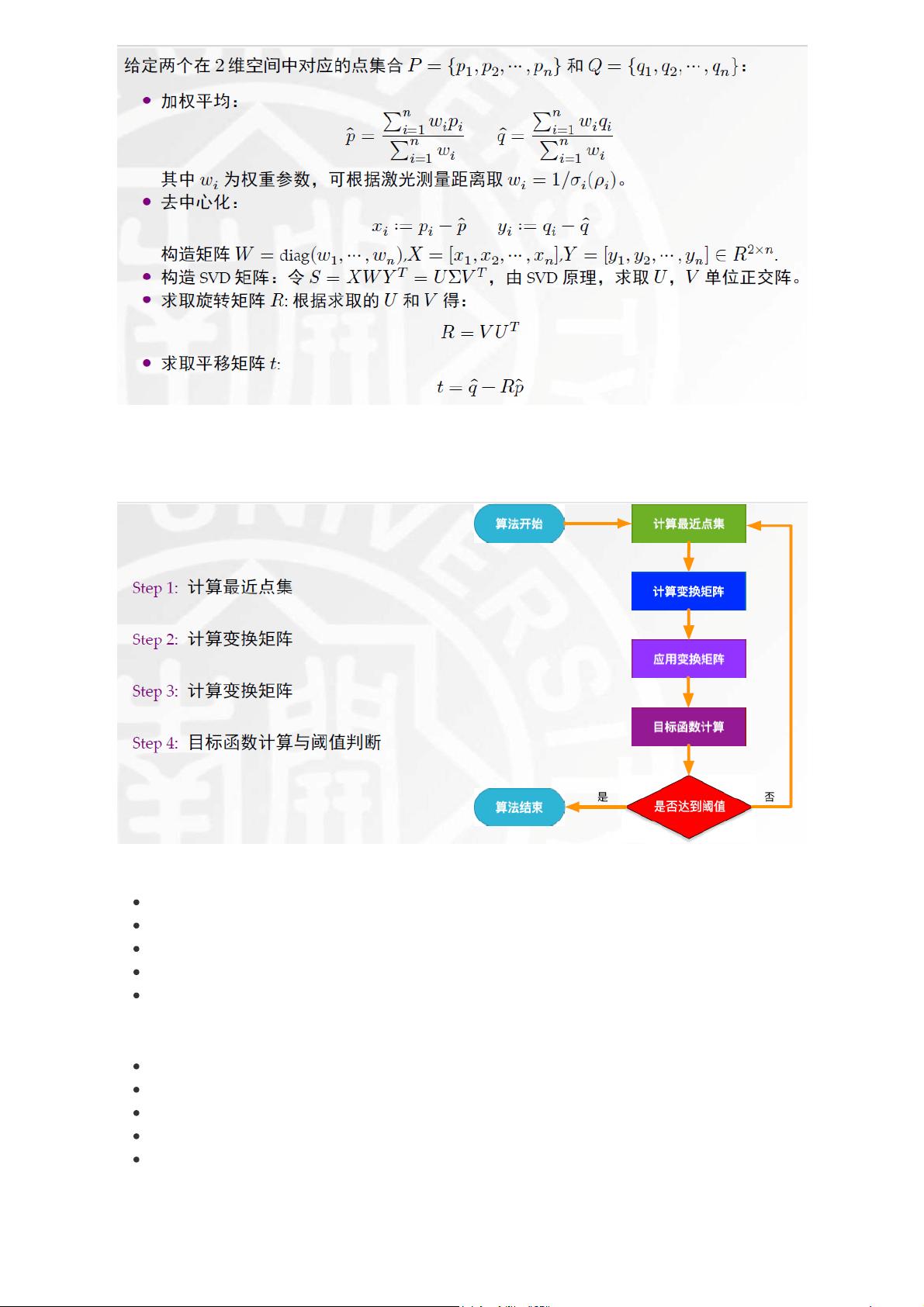
奇异值分解(SVD)是解决最小二乘拟合问题的有效工具,特别是在机器人定位中,通过SVD可以计算出两个坐标系之间的刚体变换,包括旋转矩阵和平移矩阵。这在传感器数据集成和SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)中非常关键。
最后,迭代最近点(ICP)算法是一种常用的方法,用于优化机器人在不同阶段的定位。ICP方法通过不断迭代寻找最近点匹配,优化机器人在环境中的位置估计,可以采用不同的采样策略,如全部采样、均匀采样、随机采样或基于特征的采样等。
这份复习笔记涵盖了移动机器人技术的关键知识点,从机械结构到控制策略,再到传感器数据处理和定位算法,为深入理解移动机器人的行为和控制提供了全面的框架。
剩余10页未读,继续阅读
2018-06-05 上传
2018-11-29 上传
2015-07-12 上传
2021-09-27 上传
2021-03-12 上传
2021-09-18 上传
2021-10-05 上传
2021-05-11 上传
2024-07-12 上传

滕扬Lance
- 粉丝: 26
- 资源: 304
 我的内容管理
展开
我的内容管理
展开







最新资源
- zlib-1.2.12压缩包解析与技术要点
- 微信小程序滑动选项卡源码模版发布
- Unity虚拟人物唇同步插件Oculus Lipsync介绍
- Nginx 1.18.0版本WinSW自动安装与管理指南
- Java Swing和JDBC实现的ATM系统源码解析
- 掌握Spark Streaming与Maven集成的分布式大数据处理
- 深入学习推荐系统:教程、案例与项目实践
- Web开发者必备的取色工具软件介绍
- C语言实现李春葆数据结构实验程序
- 超市管理系统开发:asp+SQL Server 2005实战
- Redis伪集群搭建教程与实践
- 掌握网络活动细节:Wireshark v3.6.3网络嗅探工具详解
- 全面掌握美赛:建模、分析与编程实现教程
- Java图书馆系统完整项目源码及SQL文件解析
- PCtoLCD2002软件:高效图片和字符取模转换
- Java开发的体育赛事在线购票系统源码分析
