自学习中枢模式发生器在仿人机器人行走控制中的应用
版权申诉
69 浏览量
更新于2024-06-27
收藏 728KB DOCX 举报
"本文探讨了基于自学习中枢模式发生器(SL-CPG)的仿人机器人适应性行走控制策略,旨在解决仿人机器人在复杂环境中的行走难题。SL-CPG模型借鉴生物行走机制,能学习周期性输入信号,灵活调整输出频率和幅度,增强了机器人的环境适应性。"
仿人机器人作为下一代服务机器人的重要形态,因其人类外形特征和对环境的直接适应性而备受关注。行走控制是其核心技术之一,但鉴于仿人机器人高度的复杂性和动态特性,传统的编程控制方法难以实现自然且适应性强的行走。传统的行走控制,如基于零力矩点(ZMP)的方法,虽能确保预设轨迹下的平衡,但在面对地形变化时显得僵化。
中枢模式发生器(CPG)作为一种生物启发的控制策略,已经在机器人运动控制中展现出良好的适应性,尤其在游泳、爬行和多足机器人的应用中取得显著成果。然而,现有的CPG模型往往仅能输出正弦或类似正弦的波形,限制了其在复杂行走模式中的应用。Matsuoka模型等虽可一定程度调整波形,但参数调整与输出形状间的映射关系并不明确,依赖于试错法,且调整程度有限。
本文提出的自学习中枢模式发生器(SL-CPG)模型,利用快速傅里叶变换(FFT)技术,能够学习并复制周期性输入信号的任意形状,这极大地扩展了CPG的输出能力,使其能更精确地模拟复杂的行走模式。SL-CPG模型允许在线调整参数,以适应环境变化,为集成传感器信号提供了可能,从而增强了仿人机器人的行走适应性。
在实际应用中,将CPG模型应用于关节空间控制是常见做法,每个关节对应一个CPG单元,通过优化CPG网络结构,可以实现多关节协调运动,进一步提升行走的自然度和稳定性。SL-CPG模型的引入,为解决仿人机器人在复杂环境中的平衡控制和适应性行走问题提供了新的思路,有望推动仿人机器人技术的发展,使其在辅助人类工作、生活以及执行危险任务中发挥更大的作用。
通过加入 Kuramoto 项, 保持了谐波与基波间的相位差, 当基波相位发生变化时, 各次
谐波的相位能进行跟随, 因此保证了模型能够输出正确的波形. 为了保持各自学习 CPG 之
间的相位差, 也就是各模型间的相位差, 只需要另外加入 Kuramoto 项, 使相互有连接关系
的模型基波之间保持一定的相位差.
1.3 自学习 CPG 的参数调制
当自学习 CPG 模型完成对示例信号的训练学习后, 模型成为一个自治系统. 在式(8),
$ \alpha _n $和$ \omega $分别影响 CPG 输出的幅值和频率.引入幅值调节系数$ k_ \alpha $,
频率调节系数$ k_ \omega $和直流分量调节系数$ k_ a $如式(9)所示, 可以分别独立调节幅
值和频率分别为示例轨迹的$ k_ \alpha $和$ k_ \omega $倍, 这有利于自学习 CPG 根据不同
控制需求产生适应性的轨迹.
$$ \begin{align} & {{\dot r}_n} = \left( {{k_\alpha }^2{\alpha _n} - r_n^2} \right){r_n}\\ & {{\dot \phi }_n} = n{k_\omega }\omega - \lambda \sin
\left( { - n{\phi _1} - {\theta _n} + {\phi _n}} \right)\\ & P = \sum \limits_{n = 1}^i \cos {\phi _n}+k_a \end{align} $$
(9)
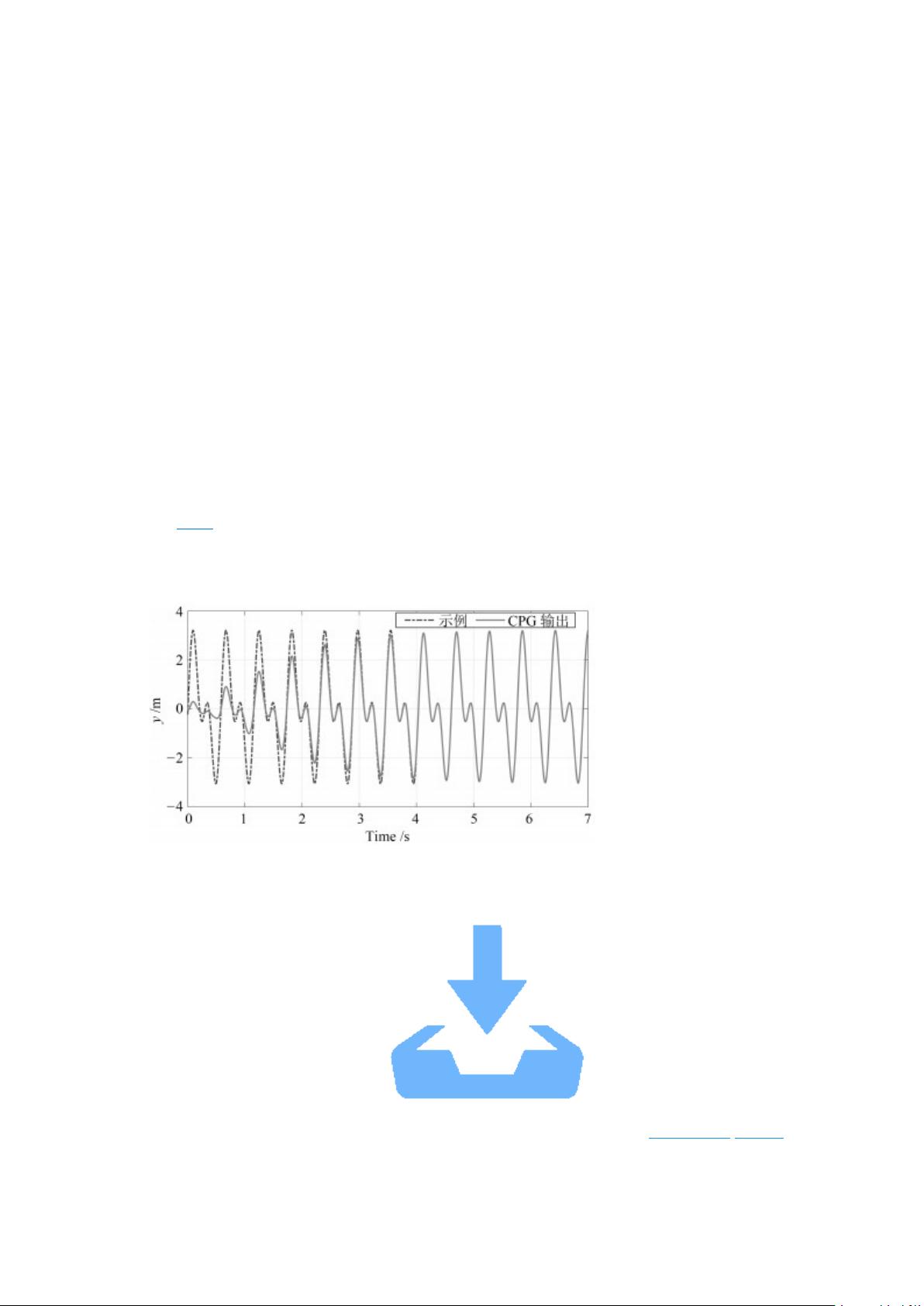
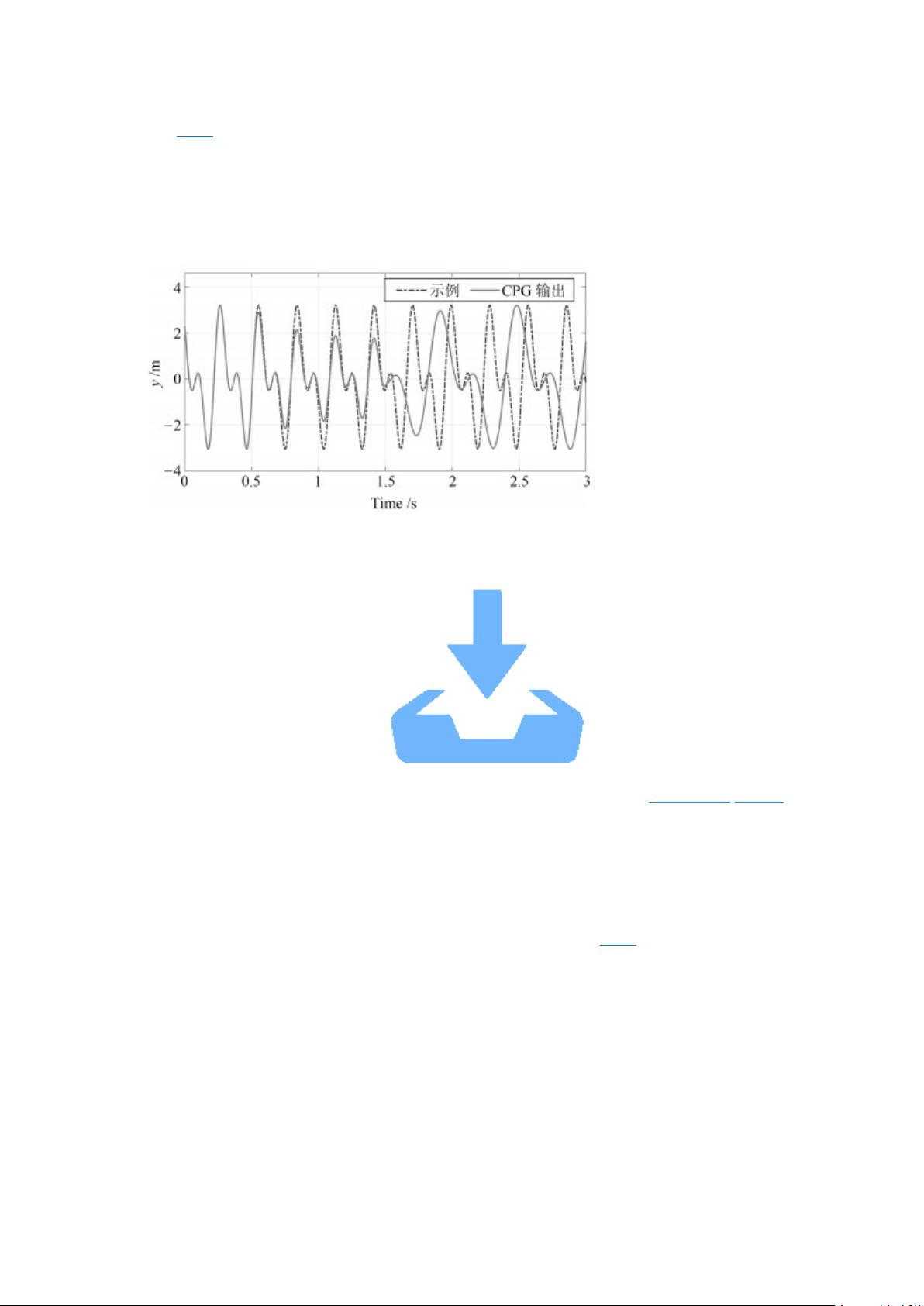
图 2 表示自学习 CPG 模型对一个示例轨迹的学习情况, 其中虚线代表示例轨迹, 实线
代表自学习 CPG 模型的输出.当为$ t < 4 $ s 时为模型学习阶段, 当$ t = 4 $ s 时, 模型学习
完成, 取消示例轨迹的输入, 此时自学习 CPG 仍然能够按照示例轨迹的形状继续生成.
图 2 自学习 CPG 学习结果
Fig. 2 The learning results of SL-CPG
下载: 全尺寸图片 幻灯片
剩余25页未读,继续阅读
2022-07-15 上传
2021-04-18 上传
2020-07-23 上传
2023-06-10 上传
2023-02-24 上传
2023-05-30 上传
2023-05-31 上传
2023-05-31 上传
2023-09-04 上传

罗伯特之技术屋
- 粉丝: 4362
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- WebLogic集群配置与管理实战指南
- AIX5.3上安装Weblogic 9.2详细步骤
- 面向对象编程模拟试题详解与解析
- Flex+FMS2.0中文教程:开发流媒体应用的实践指南
- PID调节深入解析:从入门到精通
- 数字水印技术:保护版权的新防线
- 8位数码管显示24小时制数字电子钟程序设计
- Mhdd免费版详细使用教程:硬盘检测与坏道屏蔽
- 操作系统期末复习指南:进程、线程与系统调用详解
- Cognos8性能优化指南:软件参数与报表设计调优
- Cognos8开发入门:从Transformer到ReportStudio
- Cisco 6509交换机配置全面指南
- C#入门:XML基础教程与实例解析
- Matlab振动分析详解:从单自由度到6自由度模型
- Eclipse JDT中的ASTParser详解与核心类介绍
- Java程序员必备资源网站大全
