汇川机器人系统编程指令详解
需积分: 3 53 浏览量
更新于2024-07-05
4
收藏 2.53MB PDF 举报
"汇川机器人系统指令手册"
本手册详细介绍了汇川机器人系统的编程指令,是针对使用汇川机器人进行编程操作的参考指南。手册涵盖了从基础的变量、数组、结构体、信号变量以及运算符的使用,到高级的运动控制指令、信号处理指令、系统参数相关指令和流程控制相关指令等多个方面,旨在帮助用户更好地理解和应用汇川机器人的控制系统。
1. **指令概要**
- **变量**: 变量是存储数据的基础单元,手册详细解释了如何声明和使用不同类型的变量,包括基本类型和复杂类型。
- **数组**: 数组允许存储多个相同类型的数据,手册阐述了数组的创建、访问和修改方法。
- **结构体**: 结构体用于组合不同类型的数据,形成更复杂的结构,手册介绍了结构体的定义和使用。
- **信号变量**: 信号变量用于在程序的不同部分之间传递信息,手册讲解了其作用和用法。
- **变量及指令的作用域**: 讲解了变量的可见范围和生命周期,以及指令在程序中的适用区域。
- **运算符**: 包括算术运算符、逻辑运算符、关系运算符、位运算符和特殊符号类,这些是编程中进行数据操作的关键。
2. **指令一览表**
- **关键字**: 关键字是编程语言中具有特定含义的保留词汇,手册列出了所有相关的关键字。
3. **运动指令**
- **Movj**: 快速关节运动,机器人通过关节轴的连续旋转达到目标位置。
- **Movl**: 直线运动,机器人沿直线路径到达目标点。
- **Movc**: 圆弧运动,机器人执行圆弧路径运动。
- **Jump**: 跳转指令,用于程序流程控制,跳转到指定标签位置。
- **JumpL**: 条件跳转,根据条件判断是否执行跳转。
- **Home**: 返回原点,将机器人移动到预设的回家位置。
- **ArmChange**: 机器人手臂配置改变,例如切换工具或调整工作范围。
4. **信号处理指令**
- **Set**: 设置信号值。
- **Get**: 获取信号值。
- **Wait**: 等待信号满足特定条件。
- **Group**: 对信号进行分组操作。
- **Invert**: 翻转信号状态。
5. **系统参数相关指令**
- **SetAccRamp**: 设置加速度斜坡,影响机器人的加速过程。
- **SlewMode**: 控制速度限制模式。
- **Velset**: 设置速度参数。
- **GetAlarmNo**: 获取报警号,用于诊断错误。
- **GetRunState**: 获取运行状态信息。
- 其他如设置系统工具号、用户号、飞行模式等,都是为了调整机器人系统的工作模式和参数。
6. **流程控制相关指令**
- **#指令注释**: 用于添加注释,提高代码可读性。
- **L-Goto**: 无条件跳转,类似于传统编程语言的goto语句。
该手册的最新版本B00与软件S03.21R版本配套,提供了全面的指令说明和示例,有助于用户编写高效、精确的机器人控制程序。用户可以通过汇川技术官网获取手册的PDF电子版。通过深入学习和实践手册中的内容,用户可以熟练掌握汇川机器人的编程技巧,提升机器人应用开发的能力。
指令概要
‑15‑
1.4 信号变量
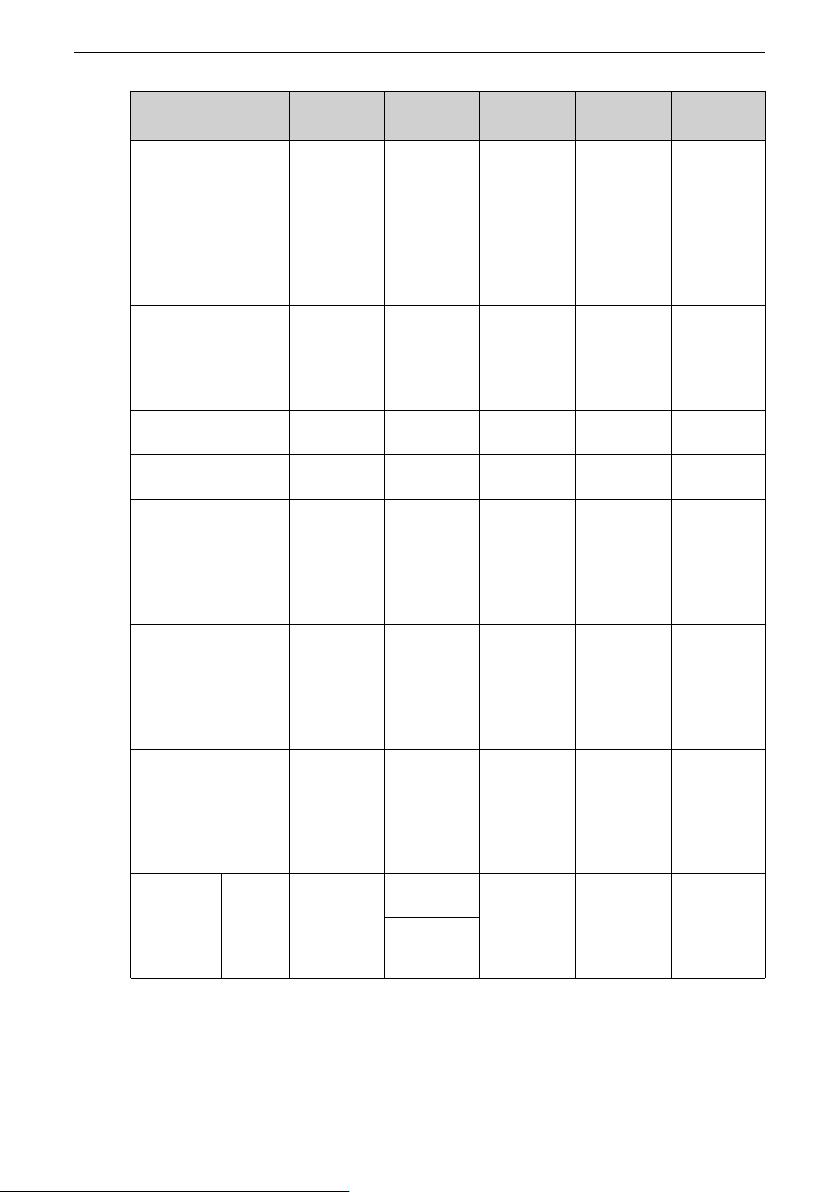
信号变量是与IO有关的变量,有In、Out、AD、DA四种。
名称 描述 取值 可使用的对象
In
数字量输入IO变量
ON/OFF In[0]‑In[63]
Out
数字量输出IO变量
ON/OFF Out[0]‑Out[63]
AD
模拟量输入IO变量 IRLink模块配置决定范围
AD[0]‑AD[15]
DA
模拟量输出IO变量 IRLink模块配置决定范围
DA[0]‑DA[15]
说明
以上列表中“可使用的对象”为最大的可使用数目。在实际使用时,可使用数目还受限于IRLink
的实际配置。
每个信号变量在缺少权限时也不能使用。例:使用该IO的控制为PLC,或被系统占用。
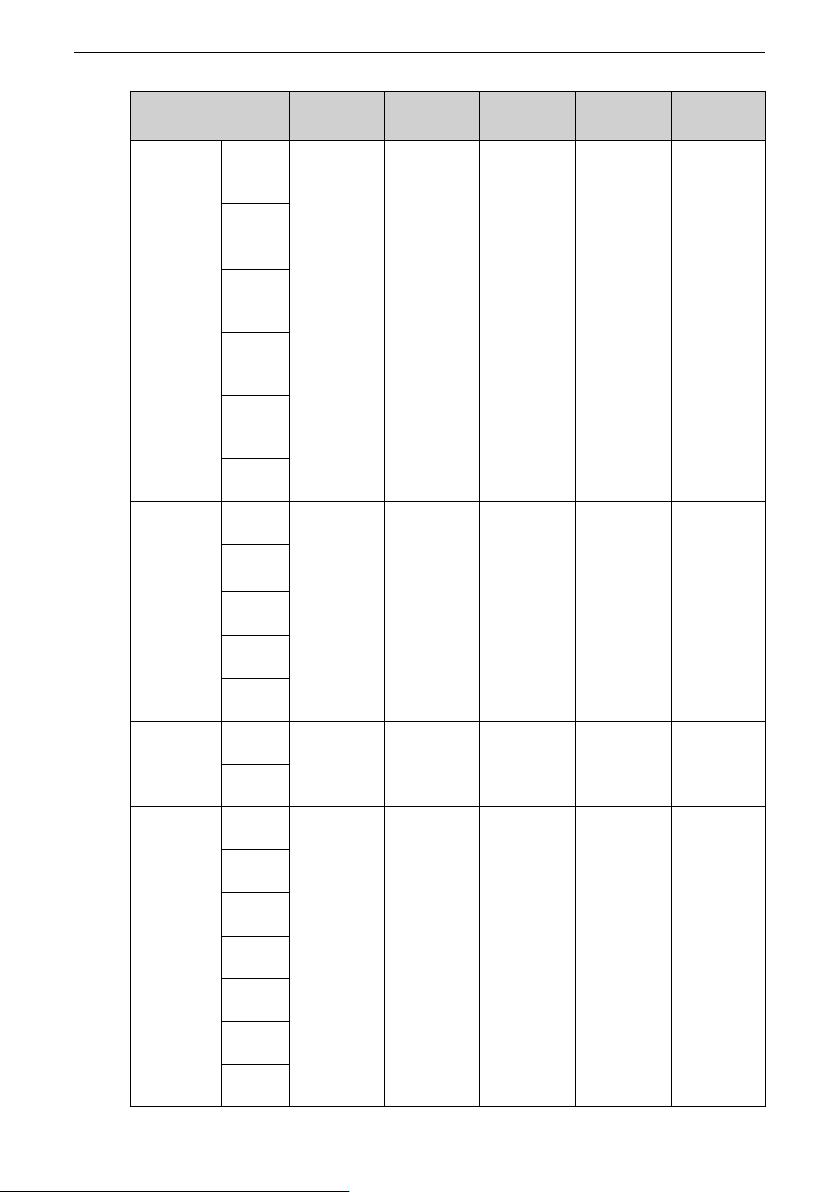
1.5 变量及指令的作用域
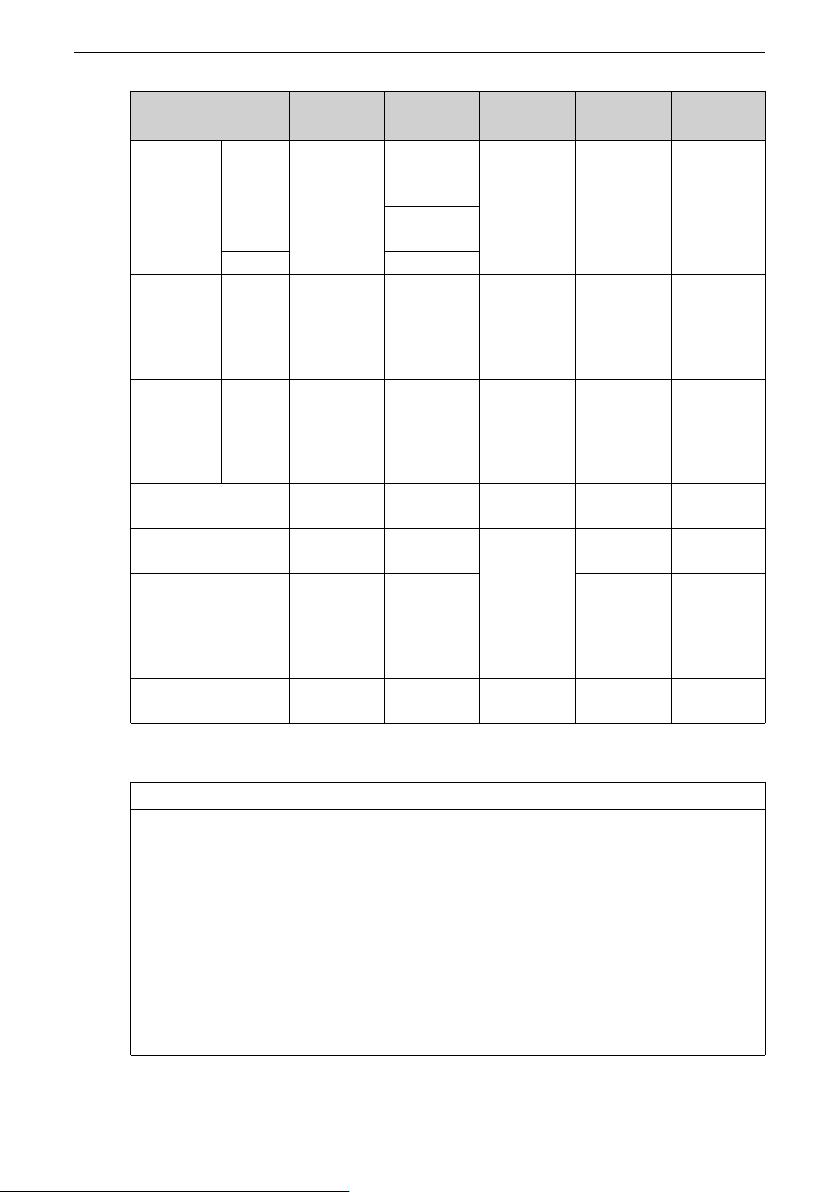
变量 初始化条件 还原值类型 作用域
全局自定义变量 工程编译
0
整个工程
全局 B R D STR PR变
量
掉电保存类型,无初始
化
不还原
整个系统
全局P位置变量 工程编译或同步全局
点文件
初始化成工程中的值 整个工程
IN OUT IG OG DA AD
重新上电
0
整个系统
局部变量(LP LB LR
LD LPR LPallet
String)
工程编译 0/空 当前任务的当前程序
文件
接收缓冲区数据、发
送缓冲区数据
Open close指令调用
或者界面关闭 打开时
初始化
断开连接,缓冲区数
据为空
整个工程
Socket 和Com口的连
接
工程编译时关闭串口
,Socket需要通过
CLOSE指令运行以及
界面关闭
连接关闭 整个工程

剩余195页未读,继续阅读
2197 浏览量
3024 浏览量
225 浏览量
629 浏览量
168 浏览量
418 浏览量
444 浏览量
257 浏览量

WderFour
- 粉丝: 15
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







