GMS算法详解:快速超鲁棒特征对应
需积分: 5 145 浏览量
更新于2024-06-18
收藏 31.68MB PPTX 举报
"GMS:特征点匹配 论文详解"
这篇论文主要探讨了GMS(Grid-based Motion Statistics,基于网格的运动统计)算法,这是一种用于快速、超鲁棒特征匹配的方法。特征匹配是计算机视觉领域中的核心任务之一,它涉及到在不同图像之间寻找对应的特征点,以实现图像间的对应关系,常用于场景识别、三维重建、物体追踪等多个应用场景。
特征匹配的传统方法通常包括检测特征点、描述特征点和匹配特征点三个步骤。GMS算法在此基础上进行了优化,特别是在鲁棒性和效率方面。论文的作者边佳旺,作为一名新加坡科技设计大学的助理研究员,于2017年在CVPR(Computer Vision and Pattern Recognition,计算机视觉与模式识别)会议上发表了这篇文章,这是当时最新的特征匹配研究。
GMS算法的核心思想是将图像分割成网格,并对每个网格内的特征点进行局部运动统计分析。这种方法能够有效地减少误匹配,提高匹配的准确性。在GMS之前,有如CODE (Contextual Orientation Descriptors) 和 RepMatch (Repeatability Maximizing Matching) 等算法,它们虽然也能实现特征匹配,但在处理复杂环境和动态变化时可能存在不足,尤其是在抗干扰和鲁棒性上。
GMS算法的优势在于其能够快速地处理大量特征点,同时保持极高的稳健性。通过在网格层面上进行统计分析,GMS能够检测并剔除不一致的匹配,这在处理具有大量噪声或光照变化的图像时尤其有用。此外,GMS还引入了一种快速解决方案,使得在大规模图像数据集上的应用成为可能,这对于实时应用和资源有限的设备来说是至关重要的。
论文详细介绍了GMS算法的实现细节,包括网格划分、运动统计模型的构建以及匹配验证策略。作者还可能对比了GMS与其他已有的特征匹配算法,展示了GMS在各种基准测试和实际场景中的性能提升,证明了其在鲁棒性和速度上的优越性。
这篇论文是针对毕业设计或深入理解特征匹配技术的学生的重要参考资料,它不仅提供了新的匹配算法,还揭示了如何通过统计方法提高特征匹配的准确性和效率,对于计算机视觉领域的研究者和开发者具有很高的参考价值。

Yanshan University GMS:Grid-based Motion Statistics for Fast,Ultra-robust Feature Correspondence
7/40
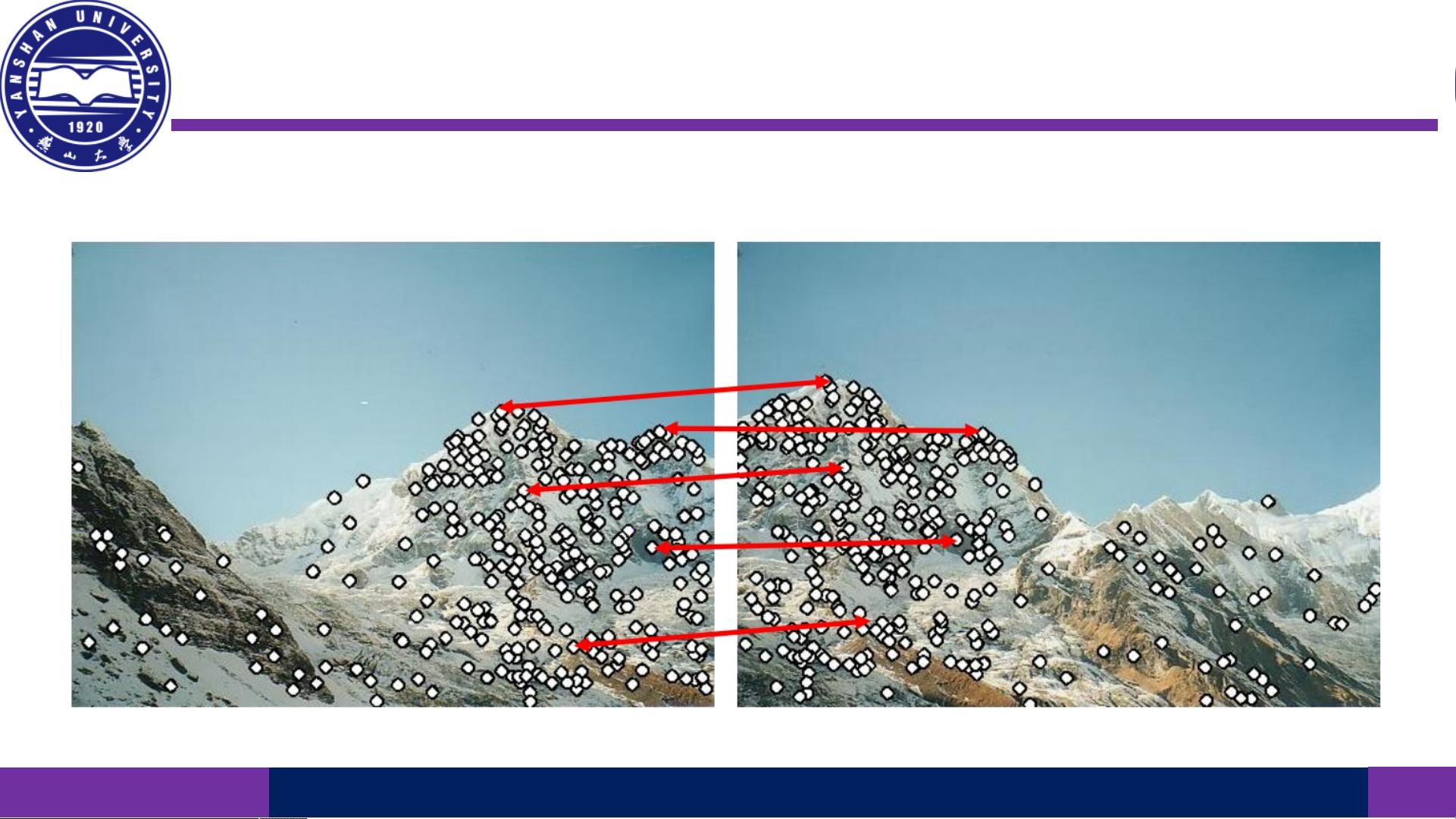
Feature Matching Introduction
• 特征匹配:所谓特征匹配(FBM),就是指将从影像中提取的
特征作为共轭实体,而将所提特征属性或描述参数(实际上是特
征的特征,也可以认为是影像的特征)作为匹配实体,通过计算
匹配实体之间的相似性测度以实现共轭实体配准的影像匹配方法
。【百度百科】
剩余39页未读,继续阅读
1146 浏览量
175 浏览量
504 浏览量
点击了解资源详情
点击了解资源详情
2865 浏览量
254 浏览量
2021-04-30 上传

ZATuTu丶
- 粉丝: 236
- 资源: 20
 我的内容管理
展开
我的内容管理
展开







最新资源
- PL2302驱动.rar
- jotto-testing-project:为使用React构建的简单猜字游戏项目编写测试
- BASS 音频输出设备自动切换-易语言
- coding-notes
- foobarx.github.io
- C# Base64编码和解码 带源码.rar
- LiveTags in every eMail-crx插件
- 自动化码头内集卡作业调度优化.rar
- UITextViewExtras(iPhone源代码)
- JLINKV9.4 PCB-自动升级固件-教程.rar
- 博克
- blogwithaddexperience
- Stocks Market-crx插件
- jsp+mysql图书馆管理系统
- EXDUI2.0日期框扩展,支持时分秒-易语言
- saybeking.github.io
