汽车自动驾驶:巡航与变道控制设计与Matlab仿真任务
需积分: 0 49 浏览量
更新于2024-08-05
收藏 614KB PDF 举报
本项目要求参与者设计并实现汽车自动巡航控制和车道变换控制器,以提升自动驾驶车辆的基本功能。目标包括精确的巡航控制和动态性能分析。以下是主要任务的详细介绍:
1. **Cruise Control**(巡航控制)
在这个部分,假设已经设计了发动机控制器,控制输入是引擎所需的动力。设计的目标是创建一个能够应对恒定干扰,如风阻和道路不平,确保车辆保持预设速度的控制器。具体任务有:
- 设计一个精确的控制器,它可以根据当前车速和环境变化,通过调节引擎输出来维持恒定的速度,例如在60, 80, 或110公里/小时等目标速度之间切换。
- 你需要考虑空气动力学因素,如密度ρ(kg/m³),无量纲阻力系数C_d(一般汽车范围约0.25至0.45),以及车辆横截面积A(m²)。这些参数对车辆速度稳定性至关重要,需要查找或测量你自己的车辆数据,或者基于家庭成员的车辆进行估算。
2. **Lateral Control (Lane Changing)**(横向控制 - 车道变换)
设计的系统还需要能够自动调整车道,即在行驶过程中根据路况和安全条件执行变道操作。这可能涉及到车辆侧向动力学的控制,确保变道过程中的平稳性和安全性。
3. **Adaptive Cruise Control**(自适应巡航控制)
自适应巡航控制是一种高级功能,它能根据前方车辆的速度动态调整跟随速度,提高驾驶舒适度和安全性。在设计阶段,需研究如何集成传感器数据(如雷达或摄像头)以实现对前方车辆的实时感知,并相应地调整速度设定。
为了评估和优化你的控制器,你将利用Matlab的Simulink进行仿真。通过模拟真实的非线性耦合动力学模型,你可以验证你的控制器在实际驾驶条件下的性能表现,包括但不限于加速度响应、稳定性、以及在不同速度和环境变化下的行为。
完成这个项目不仅需要深入理解汽车动力学和控制理论,还要掌握Matlab的工具箱,尤其是Simulink,用于建立和测试复杂的控制算法。这是一个综合性的任务,旨在提升你在汽车电子控制和仿真技术方面的技能。
1 / 4
汽车自动导航控制系统的设计与仿真任务书
This project asks you to design some of the basic components of an autonomous car: the
cruise control system and a controller for automatically changing lanes. For the parameters
of the vehicle model (masses, lengths, etc), look up or estimate numbers for your car if you
own one, or the car of a family member.
You can design and test your controllers using simple linearized models, but then also
simulate in SimuLink/Matlab on the true nonlinear coupled dynamics to verify performance.
1. Cruise Control
We assume an engine controller has been designed, so that the control input is the force
demanded from the engine.
2
1
2
D
mv A C v u d
(1)
Here 𝜌 is the density of air in kg/m
3
, C
D
is a dimensionless drag coefficient, and A is the
cross-sectional area of the vehicle in m
2
(looking from the front). Reasonable values for C
D
for a car are about 0.25 to 0.45. For your car, look up, measure or estimate A and C
D
.
(1) Design a controller that will precisely achieve the desired speed even if there are
constant disturbances.
(2) Examine the dynamics of changing from one target speed to another, e.g. 60, 80, 110
km/h.
(3) Analyze your controller's response to a disturbance force corresponding to a sudden
transition from at ground to a very steep uphill slope of 35% grade.
(4) Examine the effect of uncertainty in mass (e.g. due to the number of passengers).
2. Lateral Control (Lane Changing)
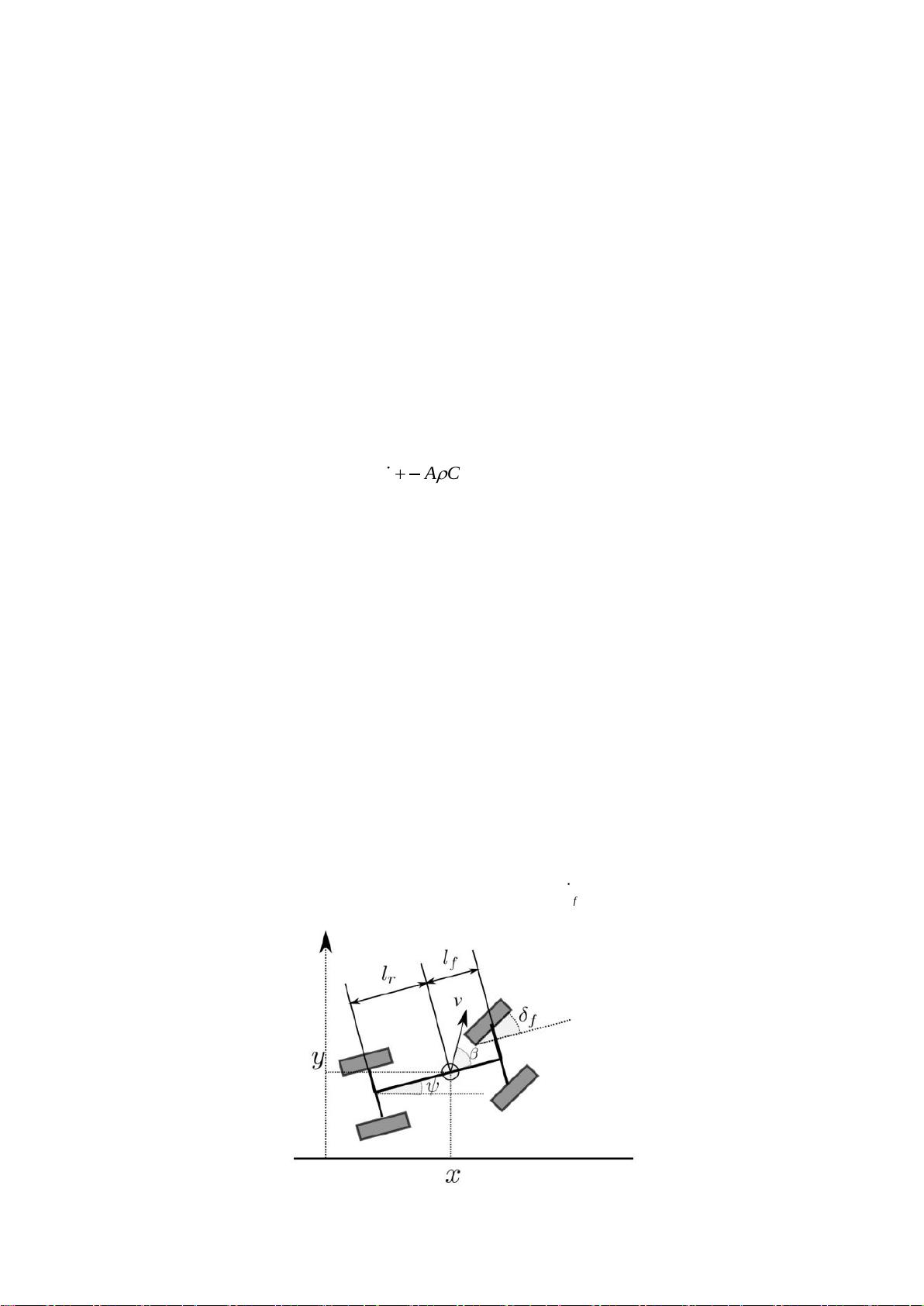
For this section we look at lateral (side-to-side) motion of the vehicle, in particular for
automatic lane changes.
A schematic of the vehicle with relevant quantities is shown below. For this question,
you should assume v > 0 is constant, and the control input is
f
, the steering wheel angle.
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-01-29 上传
2014-04-24 上传
2021-05-25 上传
2020-05-31 上传
点击了解资源详情

稚气筱筱
- 粉丝: 19
- 资源: 320
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
