PreScan与TruckSim联合仿真教程:搭建与操作步骤
版权申诉
"prescan与trucksim联合仿真.pdf"
这篇文档详细介绍了如何使用PreScan和TruckSim进行联合仿真,这是一种常用于车辆动力学研究和自动驾驶系统验证的技术。PreScan是一款虚拟测试工具,用于创建真实世界的环境模型,而TruckSim则专门用于模拟卡车和拖车的动力学行为。以下是对文档内容的详细说明:
1. **预备部分**:
- 在PreScan中创建一个新的工程,这是所有仿真的起点。
- 准备TruckSim数据库,这是包含车辆参数和动力学模型的关键部分。
- 生成TruckSim-function模块,这允许TruckSim与PreScan之间的数据交换。
- 将TruckSim-function连接到PreScan的编译表,确保两个软件能协同工作。
- 仿真设置:配置好所有参数后,即可开始运行仿真。
2. **案例: Pathfollower**:
- 这个案例展示了如何让卡车跟随特定路径行驶,可能是为了测试路径规划或控制系统。
- 首先,设置PreScan的模拟频率为200Hz,提供高分辨率的仿真数据。
- 添加DAF95卡车模型,并启用车轮位移以观察动画效果。
- 计算并输入轴距(3.82m)以精确调整车辆动力学模型。
- 调整车辆坐标系统,使其与TruckSim中的坐标系统对齐,这一步是为了确保两软件间的数据匹配。
3. **PreScan基础**:
- 创建新实验时,要设定正确的模拟频率,这对于实时性和精度至关重要。
- 添加车辆模型时,需注意车辆坐标系统的设置,确保与TruckSim一致,以减少仿真误差。
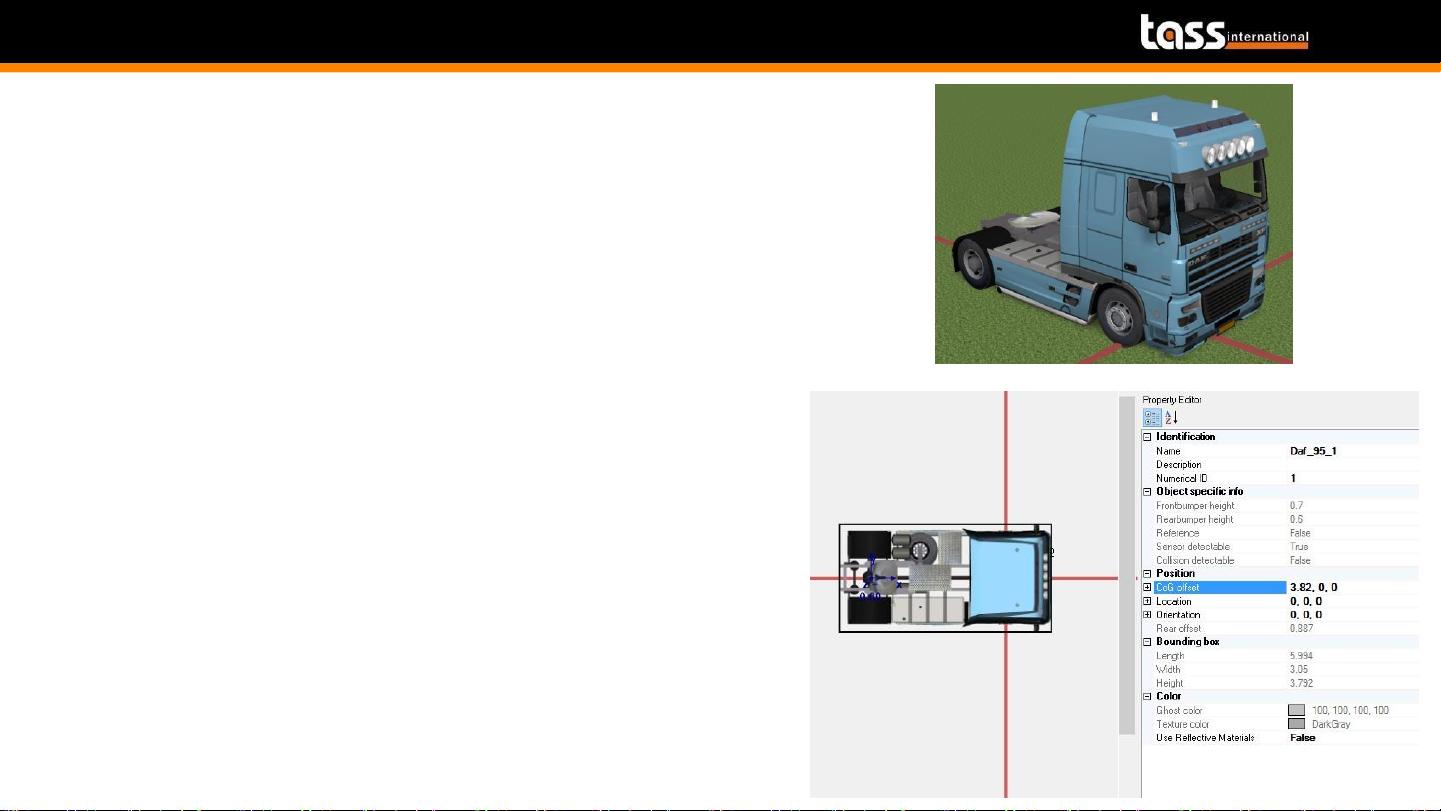
- 对象配置中的“CoG offset”(质心偏移)用于调整车辆坐标系的位置,使其与TruckSim中的前轴对齐。
- 将车辆位置设置为[0,0,0],使车辆的原点位于世界坐标系的原点,便于后续分析。
4. **软件版本**:
- 文档中使用的PreScan版本为2019.2,Matlab/Simulink版本为2018a,TruckSim版本为2016。确保使用兼容的软件版本是成功联合仿真的前提。
5. **必要的文件**:
- 诸如TruckSim_to_Simulink_2ATrailer.cpar、3ATrailer.cpar、Simulink_blocks_for_trucksim_prescan.mdl以及Trailer_v5(genericactor)等文件是联合仿真的关键组件,如果缺少,用户需要自行创建或获取。
通过这个联合仿真过程,用户可以测试和验证复杂的车辆行为,包括路径跟踪、制动性能、稳定性控制等,为实际道路测试提供安全且高效的预测试手段。这种联合仿真技术在汽车行业的研发和测试中扮演着重要角色,特别是对于自动驾驶技术的开发和验证。
Confidential
Basics - PreScan (
2
)
默认情况下,车辆坐标系统的原点位于后桥下方。在TruckSim中,它是
在地上的前轴上。我们想让它们重合,所以我们要偏移PreScan中的坐标
系统。
● Set the CoG offset to [3.82,0,0] to put the vehicle coordinatesystem
below the front axle.
● Set the vehicle positionto [0,0,0] to put the vehicle’s origin on the
world origin.
注:增加了两个校准元件(红框)来表示实验原点.
剩余24页未读,继续阅读
2021-04-08 上传
2020-12-23 上传
2021-03-16 上传
2021-09-20 上传
2021-12-16 上传

小乌龟龟stt
- 粉丝: 235
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- Java毕业设计项目:校园二手交易网站开发指南
- Blaseball Plus插件开发与构建教程
- Deno Express:模仿Node.js Express的Deno Web服务器解决方案
- coc-snippets: 强化coc.nvim代码片段体验
- Java面向对象编程语言特性解析与学生信息管理系统开发
- 掌握Java实现硬盘链接技术:LinkDisks深度解析
- 基于Springboot和Vue的Java网盘系统开发
- jMonkeyEngine3 SDK:Netbeans集成的3D应用开发利器
- Python家庭作业指南与实践技巧
- Java企业级Web项目实践指南
- Eureka注册中心与Go客户端使用指南
- TsinghuaNet客户端:跨平台校园网联网解决方案
- 掌握lazycsv:C++中高效解析CSV文件的单头库
- FSDAF遥感影像时空融合python实现教程
- Envato Markets分析工具扩展:监控销售与评论
- Kotlin实现NumPy绑定:提升数组数据处理性能
