使用ATLAS探测器在13 TeV pp碰撞中搜索低质量Dijet共振
48 浏览量
更新于2024-07-16
收藏 703KB PDF 举报
"这篇公开访问的文章是ATLAS合作团队发表的关于在13 TeV质心能量的pp碰撞中利用ATLAS探测器进行低质量双喷流共振搜索的研究。研究中,他们面对的一个主要挑战是单射流触发器在低横向动量下的数据采集速率远低于标准模型多喷流产生的速率,这限制了亚TeV质量共振的搜索效率。为解决这个问题,研究者采用了一种新的方法,即只记录由射流触发算法计算出的事件信息,这样能在降低存储需求的同时提高事件发生率。他们的目标是寻找450到1800 GeV质量范围内的双喷流共振现象。分析的数据集最高集成照度达到29.3 fb-1。经过分析,没有发现任何异常现象,因此,他们对新粒子引起的双喷流质量分布的高斯形贡献以及与夸克有轴向矢量耦合的暗物质粒子模型设定了限制。"
这篇论文详细介绍了在大型强子对撞机(Large Hadron Collider, LHC)上,使用ATLAS实验装置进行的一次低质量双喷流共振搜索。在13 TeV的质心能量下,由于单个射流触发器在低横动量区域的数据采集能力有限,搜索可能受到统计上的限制。为了突破这个限制,研究者设计了一种创新的方法,即只保存由触发器计算的事件信息,而不是完整的事件记录,从而在保持较高事件处理速度的同时减少存储需求。
研究的焦点在于450到1800 GeV质量区间内的双喷流共振,这是一个可能揭示新物理现象的领域。在这个范围内,他们分析了高达29.3 fb-1的综合照度数据,这些数据是在13 TeV的碰撞能级下收集的。通过对数据的深入分析,没有观察到超出标准模型预期的信号,这意味着在设定的质量范围内没有发现新的粒子。因此,他们根据分析结果,对新粒子(如可能存在的超对称粒子)导致的双喷流质量分布的高斯形贡献设定了上限,同时也对暗物质粒子模型(特别是那些通过轴向矢量耦合与夸克相互作用的模型)给出了限制。
这项工作的结果不仅提供了对现有理论模型的检验,还展示了在处理大量数据时如何优化触发和存储策略,以提高对新物理现象的敏感性。同时,它也为未来类似的低能标搜索提供了方法论上的参考。
beyond the range, to 2970 (3490) GeV for the jy
j < 0.6
(0.3) signal selection, and the fit is evaluated at the center of
the window.
In each sliding window, three functional forms are fit to
the data: a five-parameter function of the form
fðxÞ¼p
1
ð1 − xÞ
p
2
x
p
3
þp
4
ln xþp
5
ln x
2
; ð1Þ
where p
i
are free parameters and x ≡ m
jj
=
ffiffiffi
s
p
; a four-
parameter function, which is the same as Eq. (1) but with
p
5
¼ 0; and a four-parameter function used by the UA2
Collaboration [28], defined as
fðxÞ¼
p
1
x
p
2
e
−p
3
x−p
4
x
2
: ð2Þ
The function used for each signal selection is the one that
yields the best χ
2
over the full fitted m
jj
range. An
alternative function is chosen to evaluate a systematic
uncertainty. For the signal selection with jy
j < 0.6,
Eq. (1) is used, yielding a χ
2
p value of 0.13, while the
alternative function is the four-parameter function with a χ
2
p value of 0.11. For the signal selection with jy
j < 0.3, the
four-parameter version of Eq. (1) yields the best χ
2
p value
of 0.42 and the alternative function is Eq. (2), with a χ
2
p value of 0.35.
The size of the sliding window is optimized to yield the
best χ
2
value for the full m
jj
range while still being larger
than the width of the expected signals and therefore
insensitive to potential signal contributions. This latter
requirement is checked by including signal models in
pseudo-data samples and studying the dependence of the
signal sensitivity on different window sizes.
Systematic uncertainties in the estimate of the back-
ground used in setting limits include the uncertainty due to
the choice of functional form and uncertainties in the fit
parameter values. The effect of the choice of functional
form is evaluated by comparing the nominal function to the
alternative. The uncertainties in the fit parameter values are
evaluated using pseudoexperiments, where the pseudodata
are drawn from Poisson fluctuations around the nominal
background model.
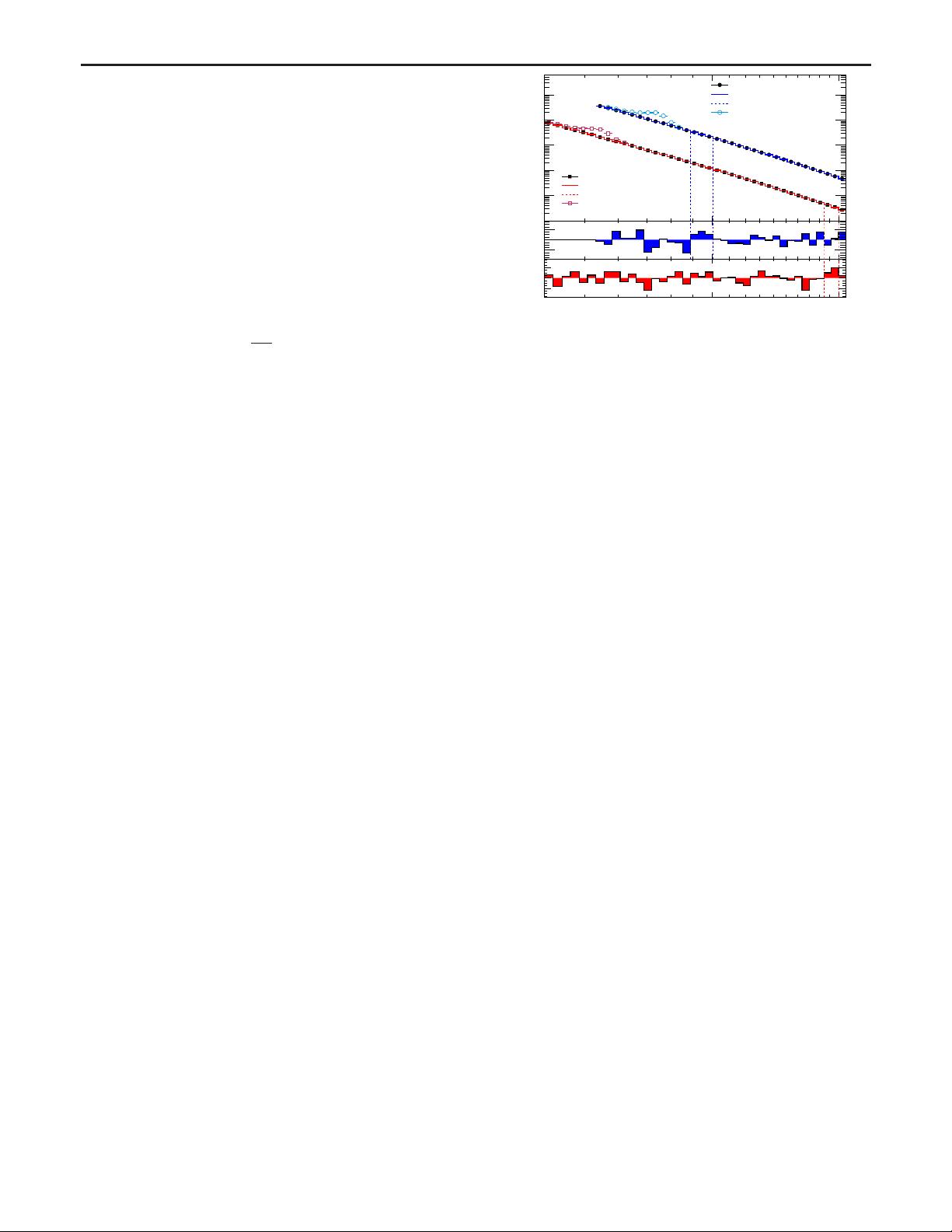
Results and limits.—Figure 4 shows the invariant mass
distributions for dijet events in each signal region including
the results from the sliding-window background estimates.
The χ
2
p value of the overall background is 0.13 for the
jy
j < 0.6 signal selection and 0.42 for the jy
j < 0.3 signal
selection, indicating the data agrees well with the back-
ground estimate. The most discrepant interval identified by
the BumpHunter algorithm [33,34] is 889–1007 GeV for
events with jy
j < 0.6. Accounting for statistical uncer-
tainties only, the probability of observing a deviation at
least as significant as that observed in data, anywhere in this
distribution, is 0.44 and corresponds to significance of
0.16σ. Thus, there is no evidence of any localized excess.
Limits are set on both a leptophobic Z
0
simplified
dark-matter model [36] and a generic Gaussian model.
The Z
0
simplified model assumes axial-vector couplings to
SM quarks and to a Dirac fermion dark-matter candidate.
No interference with the SM is simulated. Signal samples
were generated so that the decay rate of the Z
0
into dark-
matter particles is negligible and the dijet production rate
and resonance width depend only on the coupling of the Z
0
to quarks, g
q
, and the mass of the resonance, m
Z
0
[9]. The
model’s matrix elements were calculated in M
AD
G
RAPH
5
[37] and parton showering was performed in P
YTHIA
8 [38]
with the A14 set of tuned parameters for underlying event
[39] and NNPDF2.3 parton distribution functions [40].
The width of a Z
0
resonance with g
q
¼ 0.10, including
parton shower and detector resolution effects, is approx-
imately 7%. Limits are set on the cross section, σ, times
acceptance, A, times branching ratio, B, of the model, and
then displayed in the ðg
q
;m
Z
0
Þ plane [41]. The acceptance
for a mass of 550 GeV is 20% for a Z
0
simplified model
with g
q
¼ 0.10 for the jy
j < 0.3 signal selection, and 41%
for a signal of mass equal to 750 GeV for the jy
j < 0.6
signal selection.
Limits are also set on a generic model where the signal is
modeled as a Gaussian contribution to the observed m
jj
distribution. For a given mean mass, m
G
, four different
Gaussian widths are considered: a width equal to the
simulated mass resolution (which ranges between 4%
and 6%), and the fixed fractions 5%, 7%, and 10% of
m
G
. As the width increases, the expected signal contribu-
tion is distributed across more bins. Wider signals are
Events / Bin
4
10
5
10
6
10
7
10
8
10
[GeV]m
500 600 700 800 900
1000
2−
0
2
[GeV]
jj
m
500 600 700 800 900
1000
2000
2−
0
2
Significance
ATLAS
, |y*| < 0.3
-1
Data, 3.6 fb
Background fit
BumpHunter interval
x 500σZ’,
= 0.1
q
= 550 GeV, g
Z’
m
, |y*| < 0.6
-1
Data, 29.3 fb
Background fit
BumpHunter interval
x 500σZ’,
= 0.1
q
= 750 GeV, g
Z’
m
value = 0.6pBH
value = 0.42p
2
χ
value = 0.44pBH
value = 0.13p
2
χ
FIG. 4. The reconstructed dijet mass distribution (filled points)
for events in the jy
j < 0 . 3 and jy
j < 0 . 6 signal regions. Solid
lines depict the background estim ate obtained by a sliding-
window fit. Overall agreement between the background estimate
and the data is quantified by the χ
2
p value. The most discrepant
localized excess in either signal region identified by the Bump-
Hunter algorithm is indicated by the vertical lines. The open
points show two possible signal models. The lower panels show
the bin-by-bin significances of differences between the data and
the background estimate, considering only statistical uncertain-
ties (see Ref. [35]).
PHYSICAL REVIEW LETTERS 121, 081801 (2018)
081801-4
剩余19页未读,继续阅读
2020-04-16 上传
2020-04-20 上传
2020-04-24 上传
2020-04-05 上传
2020-04-29 上传
2020-05-04 上传
2020-04-02 上传
2020-04-17 上传
2020-04-02 上传

weixin_38690095
- 粉丝: 4
- 资源: 914
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入浅出:自定义 Grunt 任务的实践指南
- 网络物理突变工具的多点路径规划实现与分析
- multifeed: 实现多作者间的超核心共享与同步技术
- C++商品交易系统实习项目详细要求
- macOS系统Python模块whl包安装教程
- 掌握fullstackJS:构建React框架与快速开发应用
- React-Purify: 实现React组件纯净方法的工具介绍
- deck.js:构建现代HTML演示的JavaScript库
- nunn:现代C++17实现的机器学习库开源项目
- Python安装包 Acquisition-4.12-cp35-cp35m-win_amd64.whl.zip 使用说明
- Amaranthus-tuberculatus基因组分析脚本集
- Ubuntu 12.04下Realtek RTL8821AE驱动的向后移植指南
- 掌握Jest环境下的最新jsdom功能
- CAGI Toolkit:开源Asterisk PBX的AGI应用开发
- MyDropDemo: 体验QGraphicsView的拖放功能
- 远程FPGA平台上的Quartus II17.1 LCD色块闪烁现象解析
