FPGA实现Sobel边缘检测算法的研究与应用
版权申诉
15 浏览量
更新于2024-09-07
收藏 293KB DOCX 举报
"采用可编程逻辑器件实现Sobel边缘检测算法的研究和分析"
本文主要探讨了在实时图像处理中,如何采用可编程逻辑器件,特别是Field Programmable Gate Array (FPGA)来实现Sobel边缘检测算法。Sobel边缘检测是一种常用的图像处理技术,用于识别图像中的边界或边缘,它通过计算像素的梯度强度来确定图像的边缘位置。FPGA因其高速、并行处理能力以及内置存储器等特点,成为实现这种算法的理想平台。
首先,文章介绍了Altera的 Quartus II软件中的Megafunctions,这是一个强大的IP核库,提供了包括算术运算、逻辑门、I/O、存储器等不同功能的模块。使用这些预定义的宏功能模块,设计者可以简化代码编写,同时通常能得到更优化的综合和实现结果。例如,文中提到的altshifttaps、altmultadd、parallel_add和lpm_abs等模块,分别用于实现基于RAM的移位寄存器、乘加运算、并行加法和绝对值计算,这些都是Sobel边缘检测算法的关键组成部分。
Sobel边缘检测算法的基本流程包括计算水平梯度(Gx)和垂直梯度(Gy),然后结合这两个梯度值来确定边缘。图1展示了算法的总体框架,而图2(a)至图2(c)则给出了Sobel算子的3×3滤波器示例。通过应用Sobel算子,可以得到每个像素的梯度分量,如图2(a)中z5点的x和y方向梯度。在实际操作中,为了简化计算,可以使用公式f△|Gx|+|Gy|近似梯度。
在门限处理阶段,一个基本的全局门限策略被采用,即当像素点的梯度超过特定阈值时,认为该点属于边缘。这种方法有助于滤除噪声,但可能也会丢失一些细小的边缘。为了改善这一问题,设计者可以采用自适应门限或者其他更复杂的边缘检测策略,例如Otsu's 方法或者Canny算法,以提高边缘检测的准确性和鲁棒性。
通过FPGA实现Sobel边缘检测算法,不仅可以实现高速并行处理,还能根据需要灵活调整设计,满足不同应用的需求。这种方法对于实时图像处理系统,尤其是在对处理速度有严格要求的场合,如自动驾驶、视频监控等领域,具有显著的优势。同时,通过与Matlab等软件的仿真结果对比,可以验证FPGA实现的Sobel边缘检测算法的有效性和效率。
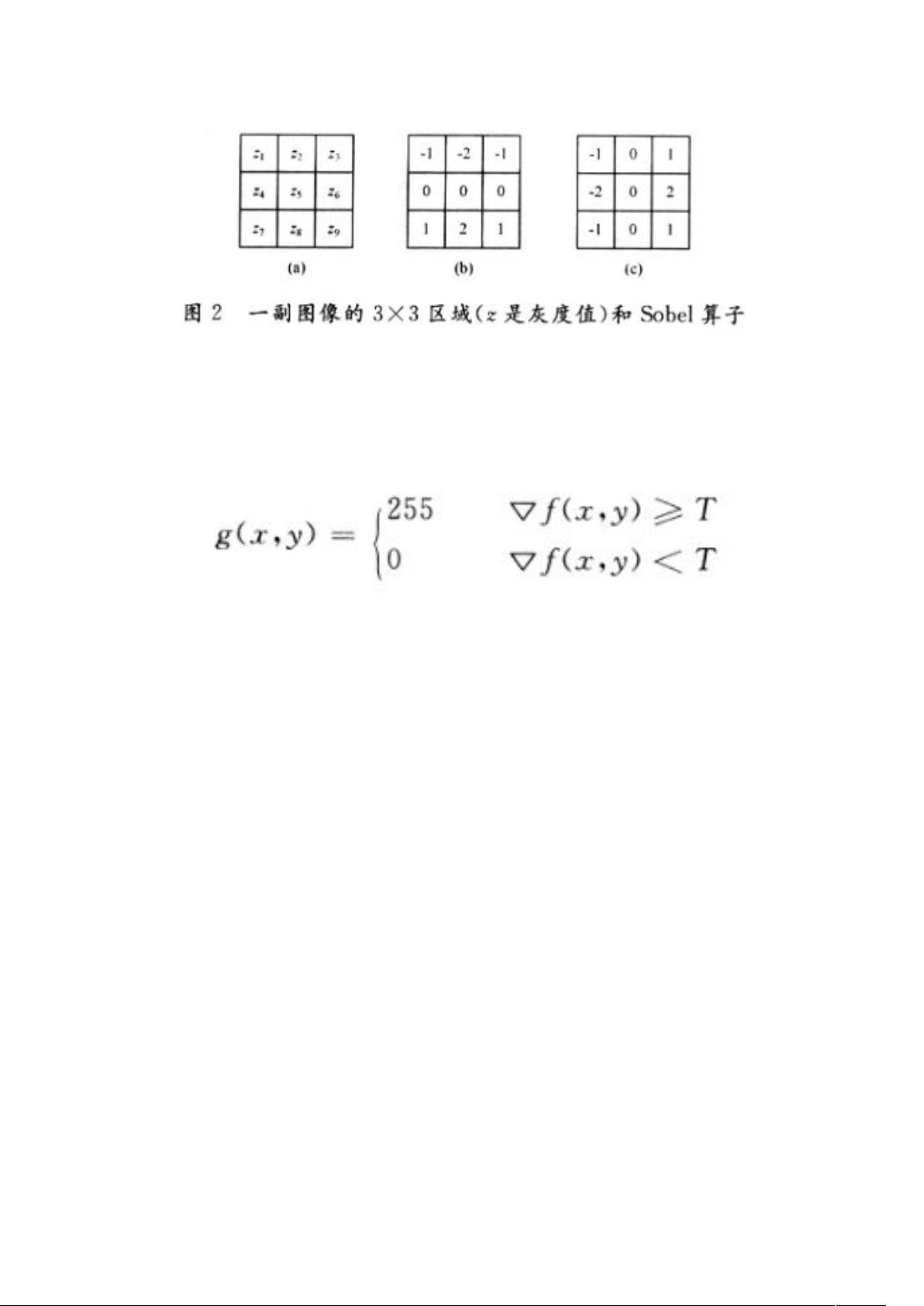
该设计在门限处理时,采用基本全局门限:当某像素点
(%,&)的梯度值 ,,,,(%,&)大于或等于设定的门限 时,
规定该点的灰度值为 "((,反之则为 -。即:
" 边缘检测的硬件实现
根据图 ! 所示的 边缘检测算法框图,可得 硬件实
现 边缘检测时应该包含梯度计算模块和门限处理模块。此外
在硬件实现时还要采用图像数据缓冲模块对图像做缓冲处理,以便
进一步对图像数据做模板处理。门限处理模块可以通过编写
(.)/01 代码实现。以下主要介绍图像数据缓冲模块和梯
度计算模块。
".! 图像数据缓冲模块器
剩余10页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-03-10 上传
2021-07-13 上传
2022-06-21 上传
2022-11-12 上传
2021-09-13 上传
2022-06-21 上传

ziyoudianzi15
- 粉丝: 0
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
