自适应模糊控制器设计:基于TSK模糊系统的非线性系统控制
需积分: 10 135 浏览量
更新于2024-08-12
收藏 292KB PDF 举报
"这篇论文是2008年9月发表的,主要研究了如何利用模糊系统设计自适应模糊控制器,特别针对非线性系统的控制问题。作者们来自华东理工大学和釜庆大学,通过TSK模糊系统理论,提出了一个基于参考模型自适应控制的方法,并利用Lyapunov函数确保闭环系统的稳定性。他们首先根据控制对象的输入输出数据建立TSK模糊模型,接着设计初步的模糊控制器,并依据自适应规则动态调整控制器参数。文中还通过倒立摆系统的仿真验证了该控制器的有效性。"
文章详细介绍了自适应模糊控制在非线性系统中的应用,特别是采用了TSK模糊系统这一工具。TSK模糊系统是由Takagi、Sugeno和Kang提出的,它是一种能够近似复杂非线性关系的数学模型,特别适合处理不确定性问题。在本文中,作者提出的设计方法是基于模型参考自适应控制,这种方法允许控制器根据期望的性能模型自我调整。
自适应控制的核心在于控制器参数的在线调整。在本文中,作者使用Lyapunov稳定性理论来保证闭环系统的稳定性。Lyapunov函数是一个关键工具,用于证明系统的稳定性,通过构造合适的Lyapunov函数并分析其增益,可以推导出控制器参数的最优调整策略,以达到系统的稳定和性能优化。
在实施过程中,首先,研究人员根据系统输入和输出数据构建TSK模糊模型,这个模型能描述系统的非线性行为。接下来,基于此模型设计初始的模糊控制器,然后根据自适应控制算法,动态地改变控制器的参数,以适应系统的变化。
为了验证自适应模糊控制器的效能,作者进行了倒立摆系统的仿真。倒立摆是一个典型的非线性动态系统,其控制具有挑战性,因为它需要维持平衡状态。仿真结果表明,所设计的控制器能有效地控制倒立摆,证明了这种方法的有效性和实用性。
关键词涵盖了自适应控制器、TSK模糊系统以及非线性系统,这些是文章探讨的核心技术领域。中图分类号1P273表明这属于控制理论与应用的范畴,文献标识码A则表示这是一篇原创性的科研论文。
这篇文章深入探讨了利用模糊系统实现自适应控制的理论和方法,为非线性系统的控制提供了一种有效途径,并通过实际案例验证了其可行性。这对于理解和应用模糊控制理论解决实际工程问题具有重要的参考价值。
2008
年
9
月
第
15
卷第
5
期
a
n
--
h
o
五「
U
A4naFTi
0
9
自
己
n
--.n
e
ρU
--n
u
氧咱
EL
空,创
'呻
dyVA
&EL
n
O
FU
Sep.2008
Vo
l.
I5
,
No.5
文章编号:
1671-7848(2
∞
8)
05-0572-04
利用模糊系统的自适应模糊控制器
全宗华张龙茧李远昌姜根泽
2
(1.华东理工大学信息学院,上海
2
∞
237;
2.
釜庆大学电子系,釜山
ω8-737)
摘
要:针对非线性系统控制,设计了利用
TSK(Takagi-Sugen
o-Kang)模糊系统的自适应模糊控
制器。所设计的自适应控制方法是参考模型自适应控制方法,而且利用
Lyapunov
函数保证了闭环系
统的稳定性,同时推导了最优的自适应控制规律。首先,根据控制对象的输入输出数据建立
TSK
模
糊模型,然后,由
TSK
模糊模型设计初期的
TSK
模糊控制器,并根据自适应规律随时调整模糊控制
器参数。倒立摆系统的仿真实导饲剖正了所设计的自适应模糊控制器的有效性。
关键词:自适应控制器
TSK
模糊系统;非线性系统
中图分类号1P
273
文献标识码
A
Adaptive Fuzzy Controller by Using Fuzzy Systerns
JIN
Zong-hua
1
, JANG
Yong
尹
OZ2
,
LEE Won-chang
2
,
κ
4N
G
Ge
un-taek
2
( 1 . Inf
onnation
Science
and
Engineering
In
st
阳
te
,
East
China
Univers
时
of
Science
and
Technology
,
Shanghai
2
∞
237
,
China;
2.
Department
of
Electronic
,
Pukyong
National
University
,
Pusan
608-737
,
Korea)
Abstract:
Adaptive
fuzzy
controller for nonlinear systerns is designed by using TSK (Takagi-Sugeno-Kang)
fuzzy
mode
l.
Th
e adaptive control is
model reference adaptive contro
l.
By
using Lyapunov function , the stability of closed-loop system is assured and the best adaptive law is calcu-
lated.
Th
e TSK
fuzzy
model is constructed based on the input-output data obtained from a
t
缸
get
plant. Then, the TSK
f1
皿
zy
controller is deter-
mined based
on
出
e
白
K
fuzzy
model. Parameters of the
fuzzy
controller can be adjusted according
to
由
e
adaptive
rule.
咀
le
adaptive
fuzzy
con-
troller is applied
to
control an inverted pendulum system, and the results show the effectiveness of the proposed method
Key
words:
adaptive controller; TSK
fuzzy
system; nonlinear system
1
引言
一般模糊控制方法适用于系统的数学模型比较
复杂或很难求得的情况。另外,确定了模糊规则,
它的参数一般不变,所以适用于系统没有参数变化
或参数变化较小的情况。如果系统存在不确定参数
或控制过程中系统存在大的参数变化时很难得到好
的控制结果。为了弥补这些缺点,本文提出了自适
应模糊控制方法。目前,
Procyk
和
Mamdani
提出的
自适应方法是没有具体的模糊模型,直接利用系统
的输入输出数据直接产生模糊控制器参数。利用神
经网络或遗传算法,通过学习的方法产生控制规律
和固定模糊控制规律,调整隶属度函数等自适应控
制方法
[1
叫。这些自适应控制方法利用的模糊规则
一般是常数或模糊集合,大部分依靠专家的经验获
得的控制规律直接利用于模糊控制规律,利用模糊
规则相对少。模糊模型和模糊控制器都是线性方程
形式的
TSK
模糊规则的自适应控制还没有进行研
究。因此,本文提出了利用
TSK
模糊系统的自适应
模糊控制方法
[5-11]
。
2
自适应模糊控制器设计
本文提出的自适应模糊控制器是参考模型自适
应模糊控制器。首先,求出控制对象的模糊模型,
根据模糊模型求出初期模糊控制器;然后,为了系
统的输出跟踪参考模型的输出随时调整模糊控制器
参数。
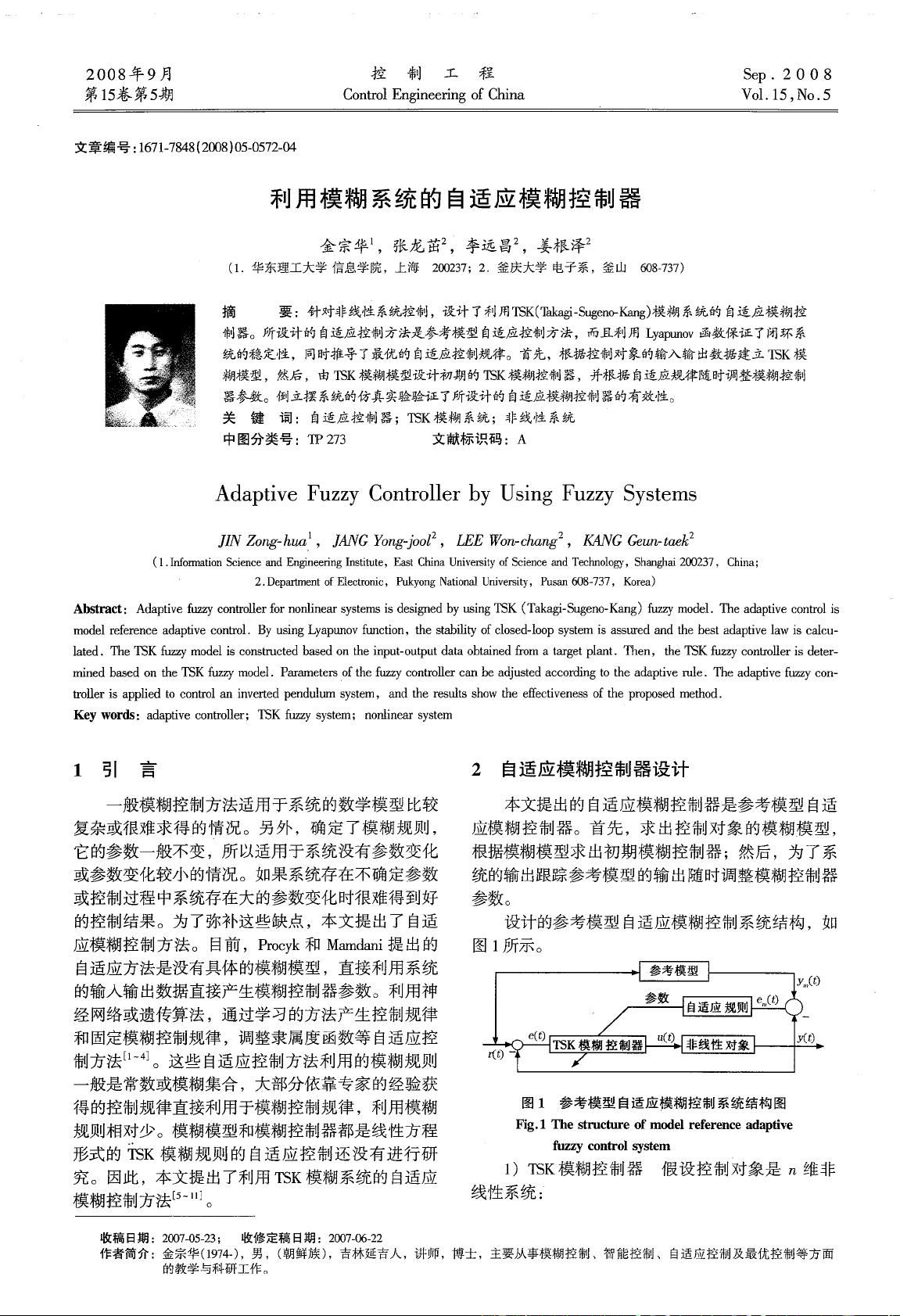
设计的参考模型自适应模糊控制系统结构,如
图
1
所示。
图
1
参考模型自适应模糊控制系统结构图
Fig.l
Th
e
structure
of
model
reference
adaptive
fuzzy
control
system
1)
TSK
模糊控制器
假设控制对象是
π
维非
线性系统:
收稿日期
2
∞
7-05-23
;
收修定稿日期
2
∞
'7-06-22
作者简介:金宗华(1
974-)
,男,
(朝鲜族),吉林延吉人,讲师,博士,主要从事模糊控制、智能控制、自适应控制及最优控制等方面
的教学与科研工作。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-05-16 上传
2021-04-28 上传
2021-05-08 上传
2021-05-14 上传
2021-06-14 上传
2021-04-27 上传
2021-05-23 上传
2021-05-26 上传
点击了解资源详情

weixin_38606870
- 粉丝: 1
- 资源: 922
 我的内容管理
展开
我的内容管理
展开







