卡尔曼滤波算法详解与C语言实现
版权申诉
16 浏览量
更新于2024-07-02
收藏 554KB DOC 举报
"该文档是关于卡尔曼滤波算法的介绍和C语言实现代码,适合对滤波技术、信号处理和互联网技术感兴趣的读者。"
卡尔曼滤波算法是一种高效的在线数据处理方法,由匈牙利数学家鲁道夫·埃米尔·卡尔曼提出。它在1960年的论文《ANewApproachtoLinearFilteringandPredictionProblems》中首次被详细介绍。卡尔曼滤波器被广泛应用于各种领域,如机器人导航、控制系统、传感器数据融合、军事雷达和导弹追踪,以及近年来的计算机图像处理。
卡尔曼滤波器的基本思想是通过结合测量数据和预测模型,以最小化预测误差来提供对系统的最优估计。它是一个递归算法,可以在每一步更新中不断优化对状态的估计,因此称为“最优化自回归数据处理算法”。
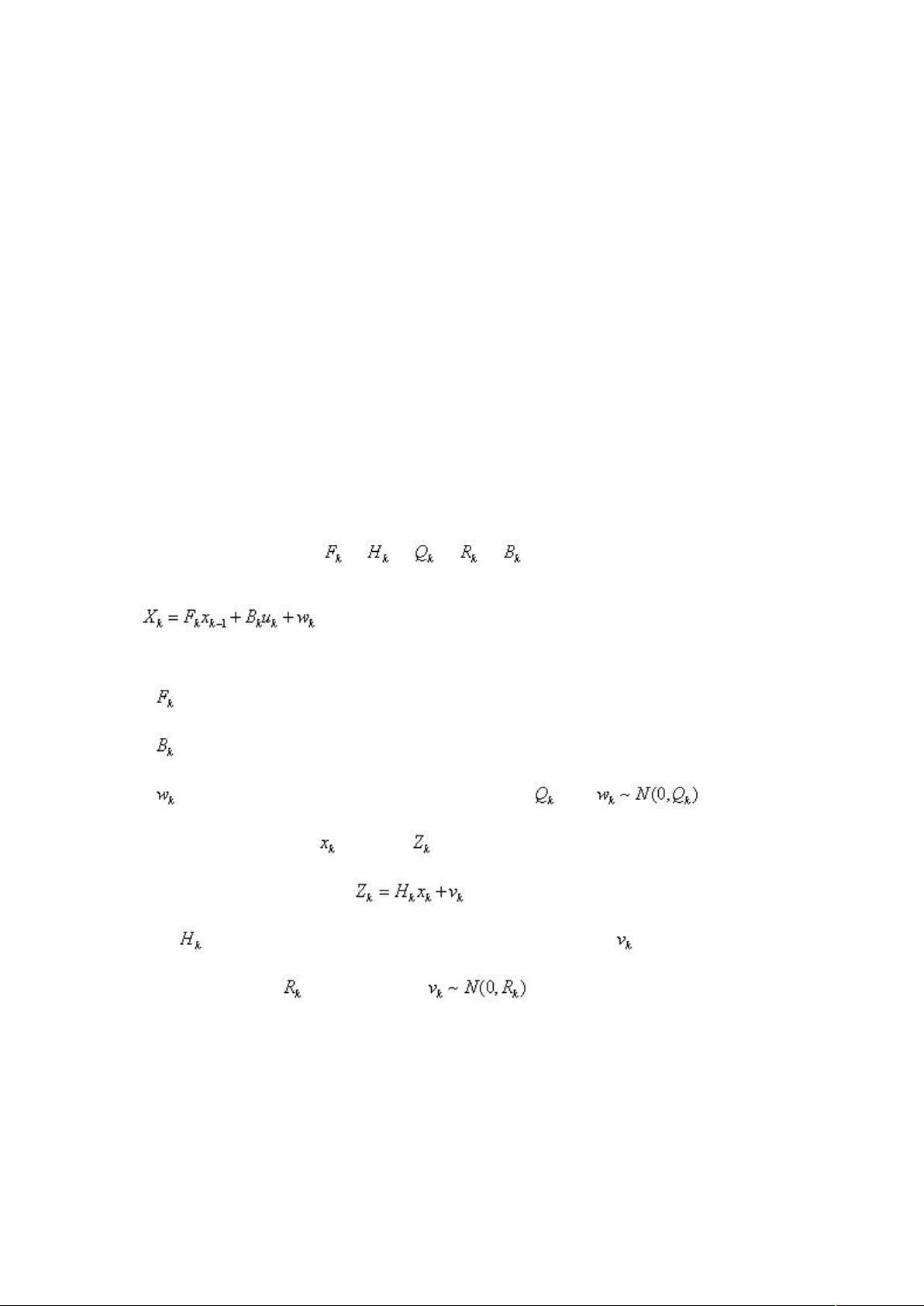
算法的核心由五个关键公式组成,这些公式涵盖了预测步骤和更新步骤:
1. **状态预测**(StatePrediction):利用上一时刻的状态和动态模型来预测下一时刻的状态。
2. **状态协方差预测**(StateCovariancePrediction):预测状态的不确定性。
3. **测量更新**(MeasurementUpdate):利用当前测量值来校正状态预测。
4. **测量协方差**(MeasurementCovariance):表示测量误差的不确定性。
5. **增益矩阵**(GainMatrix):根据预测状态和实际测量之间的相关性调整校正权重。
在C语言实现中,通常会定义结构体来存储状态变量、协方差矩阵和增益矩阵,并通过循环迭代执行上述五个步骤。代码会涉及矩阵运算,包括矩阵的乘法、加法和减法,以及逆矩阵和迹运算。
在实际应用中,卡尔曼滤波器需要根据具体问题进行定制,包括定义合适的系统模型(动态模型和测量模型),设置初始状态和协方差矩阵,并根据系统的噪声特性来确定噪声方差。
卡尔曼滤波算法是一种强大的工具,能够处理带有噪声的数据,提供高精度的实时估计。尽管它的数学原理可能较为复杂,但实际编程实现并不困难,特别是当使用C或C++这样的低级语言时,可以通过库函数简化矩阵运算。通过理解和应用卡尔曼滤波,开发者可以解决很多现实世界中的数据处理问题。
Kalman Filter
科技 2010-05-29 21:13:49 阅读 90 评论 0 字号:大中小 订阅
Kalman Filter 是一个高效的递归滤波器,它可以实现从一系列的噪声测量中,估 计动态系
统的状态。广泛应用于包含 Radar、计算机视觉在内的等工程应用领域,在控制理论和控
制系统工程中也是一个非常重要的课题。连同线性均方规划,卡尔曼滤波器可以用于解决
LQG(Linear-quadratic-Gaussian control)问题。卡尔曼滤波器,线性均方归化及线性均方高斯
控制器,是大部分控制领域基础难题的主要解决途径。
目录
■ 1应用实例
■ 2 命名和发展历史
■ 3 基本动态系统模型
■ 4 卡尔曼滤波器
4.1 预测
4.2 更新
4.3 不变量
■ 5 实例
■ 6 推导
6.1 后验估计协方差矩阵推导
6.2 Kalman 增益推导
6.3 后验误差协方差矩阵简化
■7 信息滤波
■8 非线性滤波器
8.1扩展 Kalman 滤波
8.2 Unscented Kalman filter
■9 Kalman-Bucy 滤波
■10应用
■ 11参见
■ 12参考文献
■ 13外部链接
■ 1应用实例
一个简单的应用是估计物体的位置和速度;简要描述如下:假设我们可以获取一个物体的
包含噪声的一系列位置观测数据,我们可以获得此物体的精确速度和位置连续更新信息。
例如,对于雷达来说,我们关心的是跟踪目标,而目标的位置,速度,加速度的测量值是
时刻含有误差的,卡尔曼滤波器利用目标的动态信息,去掉噪声影响,获取目标此刻好的
位置估计(滤波),将来位置估计(预测),也可以是过去位置估计的(插值或平滑)
■ 2 命名和发展历史
这个滤波器以它的发明者 Rudolf.E.Kalman 而命名,但是在 Kanlman 之前,Thorvald Nicolai
Thiele 和 Peter Swerling 已经提出了类似的算法。Stanley Schmidt 首次实现了 Kalman 滤波器。
在一次对 NASA Ames Research Center 访问中,卡尔曼发现他的方法对于解决阿波罗计划的
轨迹预测很有用,后来阿波罗飞船导航 电脑就使用了这种滤波器。这个滤波器可以追溯到
Swerling(1958),Kalman(1960),Kalman 和 Bucy(1961)发表的论文。
这个滤波器有时叫做 Stratonovich-Kalman-Bucy 滤波器。因为更为一般的非线性滤波器最初
由 Ruslan L.Stratonovich 发明,而 Stratonovich-Kalman-Bucy 滤波器只是非线性滤波器的一
个特例。事实上,1960 年夏季,Kalman 和 Stratonovich 在一个 Moscow 召开的会议中相遇,
剩余30页未读,继续阅读
2013-04-09 上传
2014-03-16 上传
2022-05-07 上传
2021-08-18 上传
2014-07-26 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-07-13 上传

智慧安全方案
- 粉丝: 3806
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索AVL树算法:以Faculdade Senac Porto Alegre实践为例
- 小学语文教学新工具:创新黑板设计解析
- Minecraft服务器管理新插件ServerForms发布
- MATLAB基因网络模型代码实现及开源分享
- 全方位技术项目源码合集:***报名系统
- Phalcon框架实战案例分析
- MATLAB与Python结合实现短期电力负荷预测的DAT300项目解析
- 市场营销教学专用查询装置设计方案
- 随身WiFi高通210 MS8909设备的Root引导文件破解攻略
- 实现服务器端级联:modella与leveldb适配器的应用
- Oracle Linux安装必备依赖包清单与步骤
- Shyer项目:寻找喜欢的聊天伙伴
- MEAN堆栈入门项目: postings-app
- 在线WPS办公功能全接触及应用示例
- 新型带储订盒订书机设计文档
- VB多媒体教学演示系统源代码及技术项目资源大全
