FANUC机器人实验指南:入门到编程详解
版权申诉
68 浏览量
更新于2024-07-03
收藏 2.26MB PDF 举报
该文档是合肥工业大学机械与汽车工程学院的机器人学实验指导书,主要针对FANUC M-6iB机器人进行教学。这份详细的指导书涵盖了以下几个关键知识点:
1. 实验概述:旨在让学生在理论学习后,通过实践操作,对机器人有一个直观的认识,激发他们对机器人技术的兴趣。实验设计旨在通过手动示教机器人来实现简单的任务,如在白板上写出“欢迎”二字。
2. 实验原理:介绍机器人控制系统的工作原理,即编写好程序后,控制器将程序编译并解释,向伺服电机发送指令,驱动它们进行精确的运动控制,实现机器人的关节运动。
3. 实验目的:
- 学生将深入了解工业机器人的组成、工作原理以及机电一体化系统的应用。
- 学习机器人的系统结构、几何结构、坐标类型和运动控制原理,增强理论知识。
- 掌握小型工业机器人的运动指令和作业编程,学会操作步骤。
- 熟悉程序控制,包括程序中断、恢复、手动执行、自动运行以及条件指令的使用。
4. 实验内容及要求:
- 实践操作环节包括手动操纵机器人在白板上写字,同时需撰写实验报告,并描绘机器人运动的简要示意图。
5. 使用的设备:实验中会用到FANUC M-6iB机器人、白板和书写笔等工具。
6. 机器人控制程序:采用在线示教编程方法,通过记录和存储机器人的动作路径,来编写和执行程序。
7. 编程和指令:
- 提供了编程技巧,如有效编程的方法,以及通电和关电的操作流程。
- 讲解了如何手动示教机器人,创建程序,理解示教运动状态,修正点的设定,以及使用编辑命令(EDCMD)。
- 分析了程序结构,包括运动指令、寄存器指令、I/O指令、分支指令、等待指令、条件指令和程序控制指令。
8. 坐标系设置:详细介绍了不同类型的坐标系,如工具坐标系、用户坐标系和点动坐标系的设置方法,这对于理解和控制机器人的位置至关重要。
这份实验指导书为学生提供了丰富的动手实践机会,不仅有助于巩固理论知识,还能培养他们的实际操作能力和解决问题的能力。通过深入理解FANUC M-6iB机器人的工作方式,学生将能够更好地适应工业自动化领域的需求。
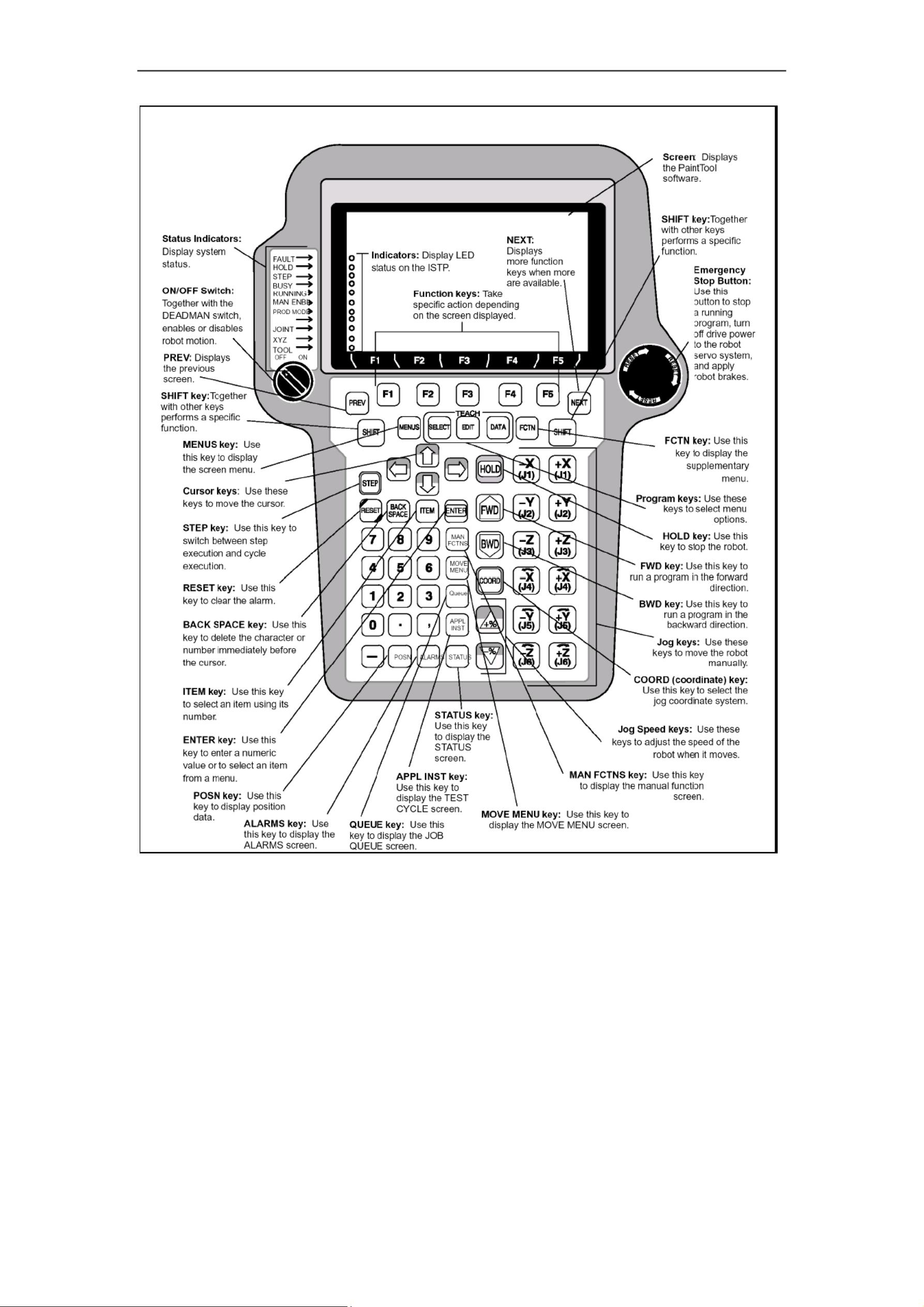
机器人学实验指导书 合肥工业大学机械与汽车工程学院
➢ Status Indicators(状态指示灯):指示系统状态。
➢ ON/OFF Switch(开关):与DEADMAN 开关一起启动或禁止机器人运动。
➢ PREV:显示上一屏幕。
➢ SHIFT key(键):与其它键一起执行特定功能。
➢ MENUS key(键):使用该键显示屏幕菜单。
➢ Cursor keys(光标键):使用这些键移动光标。
➢ STEP key(键):使用这个键在单步执行和循环执行之间切换。
➢ RESET key(键):使用这个键清除告警。
➢ BACK SPACE key(键)::使用这个键清楚光标之前的字符或者数字。
➢ ITEM key(键):使用这个键选择它所代表的项。
.7.
剩余33页未读,继续阅读
2022-07-04 上传
2022-05-27 上传
2023-06-27 上传
2023-07-14 上传
2023-08-01 上传
2023-10-17 上传
2023-06-24 上传
2023-11-04 上传

苦茶子12138
- 粉丝: 1w+
- 资源: 6万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- 黑板风格计算机毕业答辩PPT模板下载
- CodeSandbox实现ListView快速创建指南
- Node.js脚本实现WXR文件到Postgres数据库帖子导入
- 清新简约创意三角毕业论文答辩PPT模板
- DISCORD-JS-CRUD:提升 Discord 机器人开发体验
- Node.js v4.3.2版本Linux ARM64平台运行时环境发布
- SQLight:C++11编写的轻量级MySQL客户端
- 计算机专业毕业论文答辩PPT模板
- Wireshark网络抓包工具的使用与数据包解析
- Wild Match Map: JavaScript中实现通配符映射与事件绑定
- 毕业答辩利器:蝶恋花毕业设计PPT模板
- Node.js深度解析:高性能Web服务器与实时应用构建
- 掌握深度图技术:游戏开发中的绚丽应用案例
- Dart语言的HTTP扩展包功能详解
- MoonMaker: 投资组合加固神器,助力$GME投资者登月
- 计算机毕业设计答辩PPT模板下载
