CAN总线技术入门教程
需积分: 14 169 浏览量
更新于2024-07-28
收藏 1.57MB PDF 举报
"CAN总线基础教程"
CAN(Controller Area Network)总线是一种高效、可靠的串行通信协议,最初由德国博世(Bosch)公司在20世纪80年代初为了解决汽车内部多个控制单元和测试仪器之间的数据交换问题而设计。在汽车工业中,CAN总线的应用显著减少了线束的复杂性和重量,提高了系统的可靠性和安全性。
1. 概述
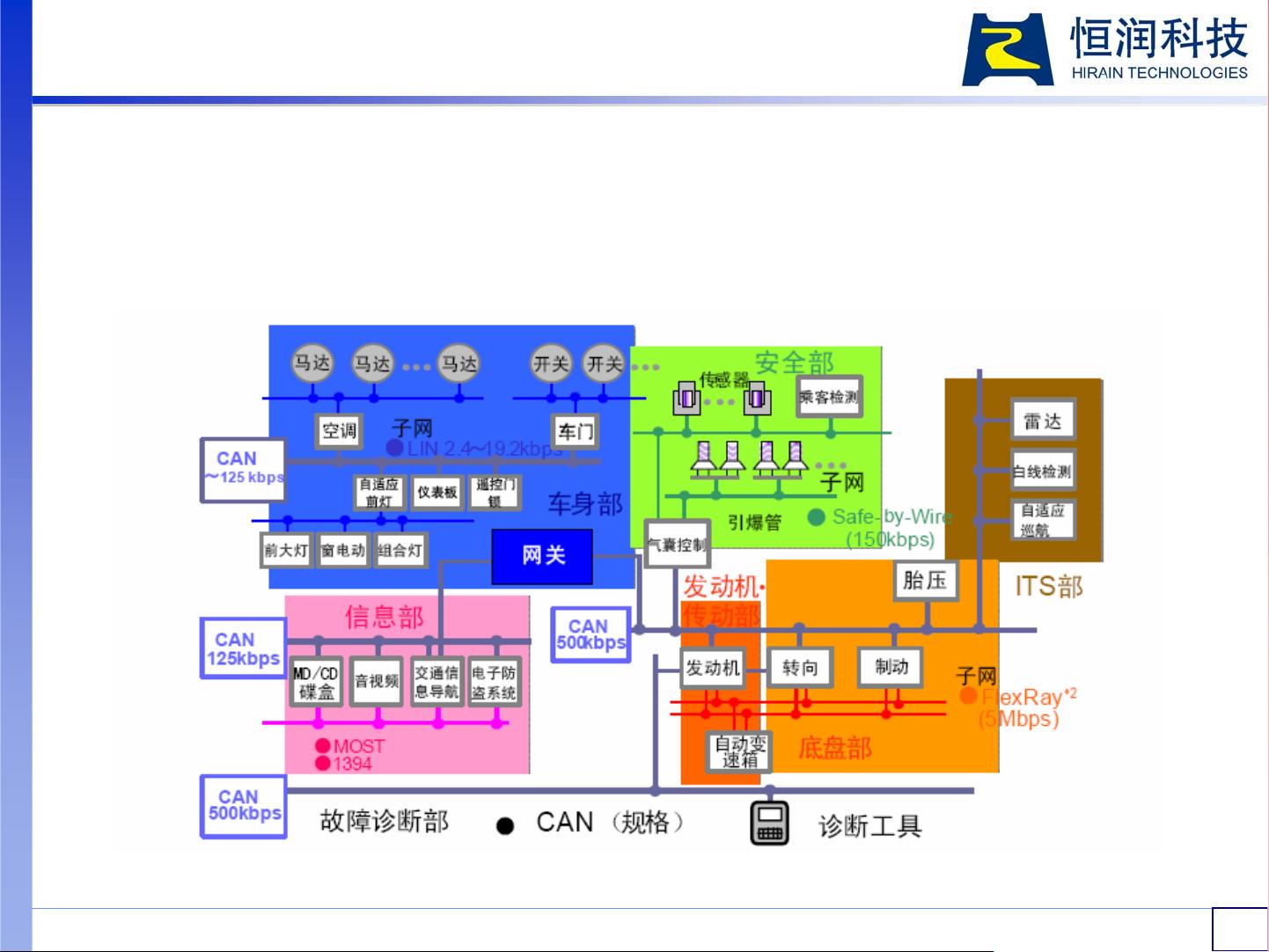
CAN总线的出现是为了应对传统汽车内部众多电子控制单元(ECU)之间复杂的线束连接。这些ECU包括发动机控制、变速器控制、防抱死刹车系统(ABS)、主动悬挂等。通过引入CAN网络,可以将这些分散的控制单元整合到一个统一的通信平台上,形成更简洁、高效的汽车网络结构。
2. 汽车总线与CAN标准
CAN标准遵循ISO 11898和ISO 11519等国际标准,提供了不同层次的数据传输服务。它支持多种数据速率,如125kbps、250kbps、500kbps等,以满足不同应用场合的需求。CAN总线具有较高的错误检测能力和容错机制,确保了在恶劣环境下的稳定通信。
3. CAN的通信机制
CAN总线采用多主站的通信方式,任何节点都可以发起通信。每个节点通过发送数据帧或接收数据帧参与网络通信。CAN总线上的数据传输基于优先级仲裁机制,即优先级高的数据帧可以在竞争中胜出,确保关键信息的优先传递。
4. 数据帧
CAN数据帧包含标识符(ID)、数据字段和校验和等部分。ID用于区分不同的消息,数据字段可以携带最多8个字节的数据,校验和则用于检测数据传输过程中的错误。
5. 错误检测与错误帧
CAN总线具备强大的错误检测能力,包括位错误、CRC错误等。当检测到错误时,会发送错误帧来中断通信并通知其他节点。错误类型分为主动错误和被动错误,错误状态会影响节点的通信权限。
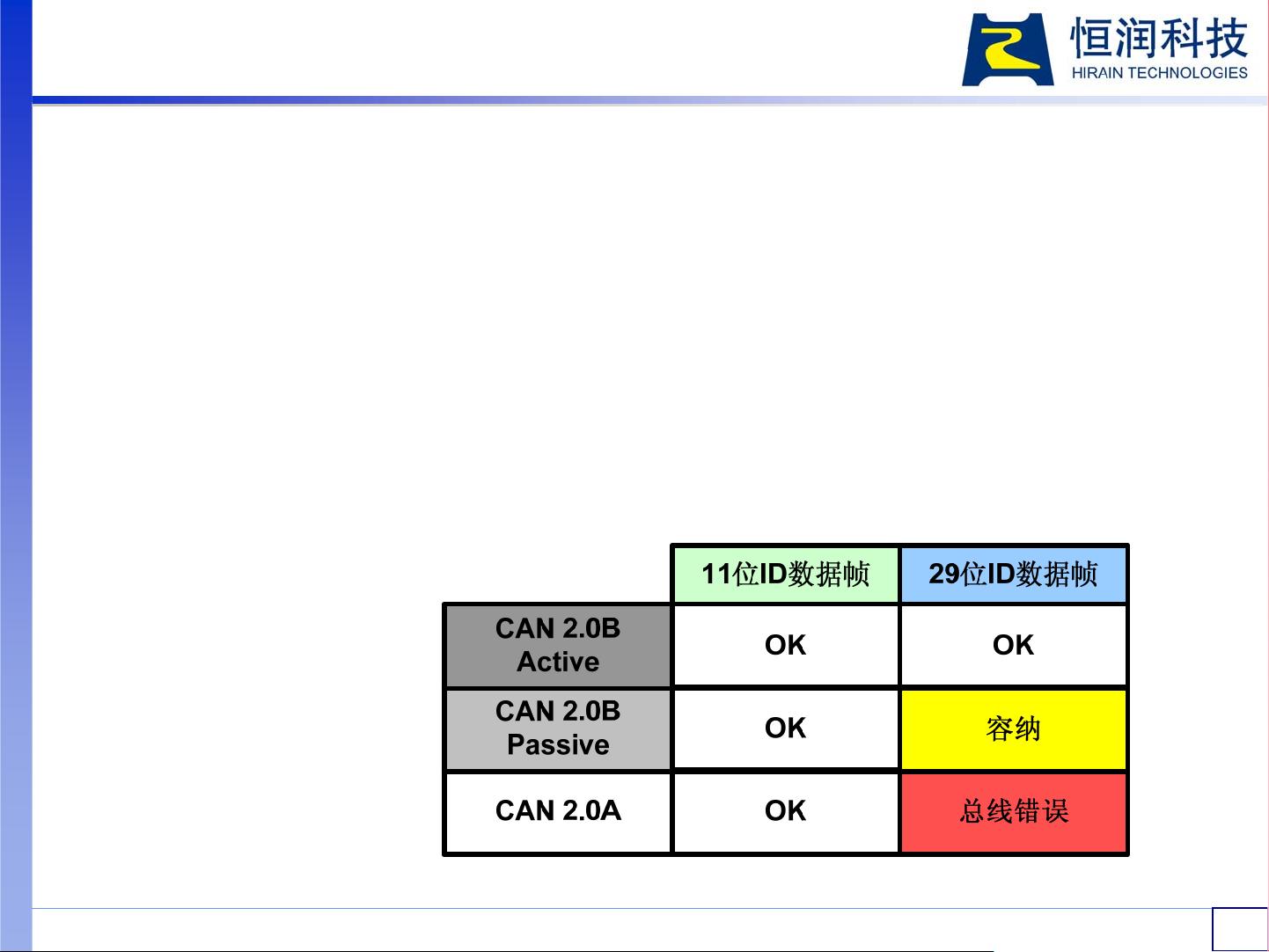
6. CAN的帧格式
CAN总线的帧格式分为标准帧和扩展帧,标准帧的ID长度为11位,扩展帧的ID长度为29位,提供更多标识符的可能性,适用于更复杂的网络环境。
7. 位定时与同步
位定时是CAN通信的关键,包括位时间的同步、传播时间和相位缓冲段等。位时间由同步段、传播段、相位缓冲段1和相位缓冲段2组成,确保了总线上的所有节点能准确地识别和处理每一位数据。
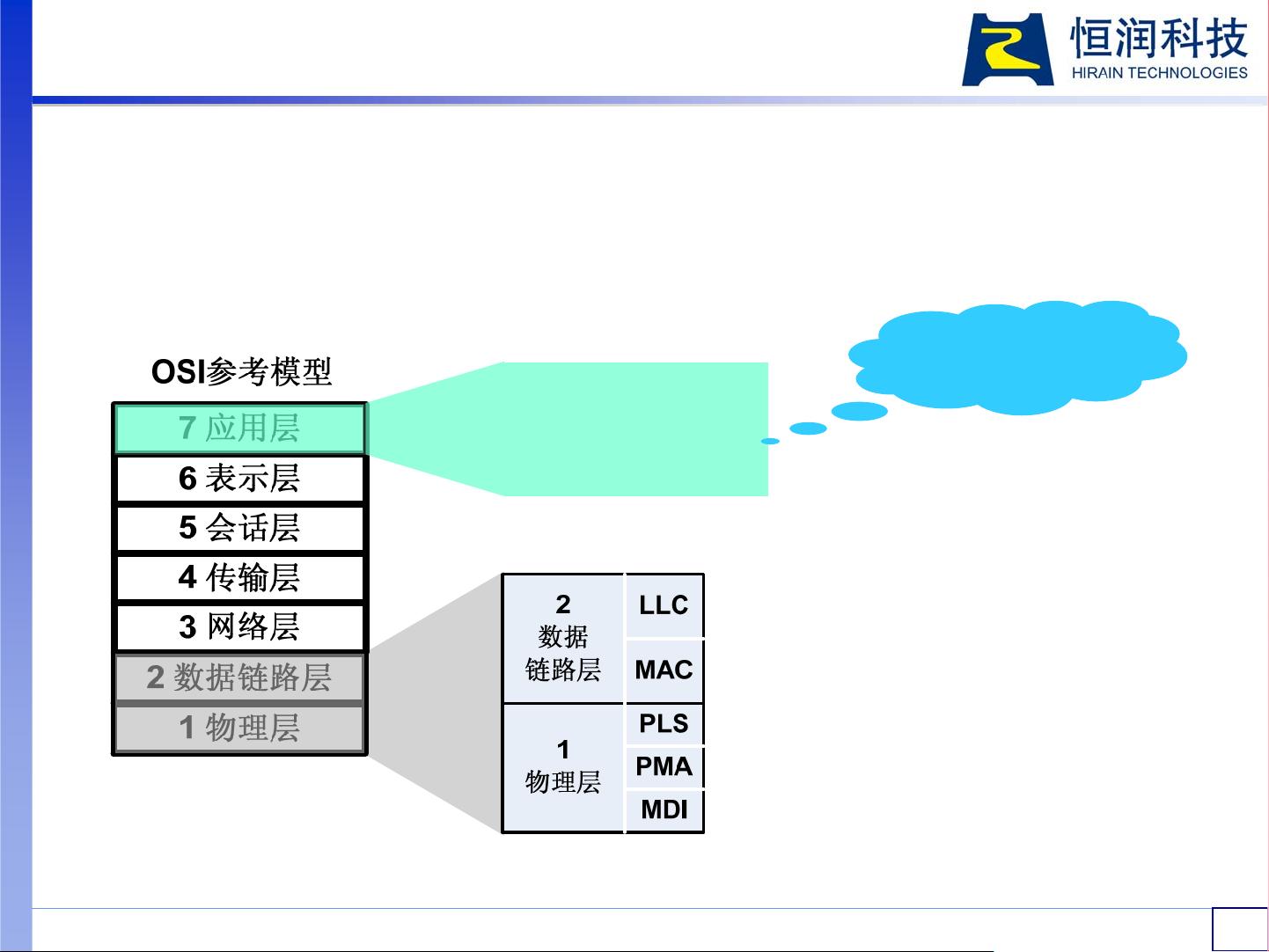
8. 物理连接
CAN总线通常采用双绞线作为传输介质,其特性阻抗为120欧姆。物理层的设计使得CAN信号能在长距离和噪声环境中保持稳定,同时支持总线上多个节点的连接。
总结来说,CAN总线作为一种高效、可靠的通信协议,已经成为汽车电子领域不可或缺的部分。通过对CAN总线基础知识的理解和掌握,工程师能够更好地设计和实施汽车电子系统,优化车辆性能和安全。

北京经纬恒润科技有限公司 http://www.hirain.com
15
汽车总线与CAN标准
汽车总线
汽车总线的分类
类别
位速率
/kbps
应用场合 应用范围 协议
A ~10
车身系统
电动门窗、座椅调节、灯光照
明控制等
LIN
CAN
B 10~125
状态系统
电子仪表、驾驶信息、故障诊
断、安全气囊、自动空调等
J1850
VAN
CAN
C 125~1000
实时控制系统
发动机控制、变速控制、ABS、
悬架控制、转向控制等
CAN
D 1000~
多媒体系统
MOST
FlexRay
D2B
IEEE1394
剩余87页未读,继续阅读
512 浏览量
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
189 浏览量
341 浏览量

yangyongy
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Keygoe系统软件配置管理与安装教程V2.1.2
- 使用MultigenCreatorPro构建的矿山三维漫游系统
- C++实现银行家算法详解与安全性检查
- 互联网数据中心(IDC)建设方案详解
- C# 3.0第五版编程指南: Jesse Liberty & Donald Xie 联合力作
- Prototype.js 1.4开发者手册:打造互动网页
- 企业信息平台的软件需求规格说明书模板
- C#编程:50个优化技巧与最佳实践
- JavaScript高效编程:55个实用技巧解析
- JavaScript基础教程:107个关键语句概览
- C#中委托与事件详解:由入门到实践
- K2 blackpearl与.NET 3.0:整合工作流技术
- NIIT计算机考试模拟题:SM3-MT2 高级试题解析
- ASP.NET入门:基础篇探讨与学习策略
- WCF服务编程:分布式系统的新纪元
- JavaScript代码技巧合集
