V12.0.03 LIN入门教程:CANoe、LDFExplorer与LIN Workshop-Compact
版权申诉
182 浏览量
更新于2024-06-18
收藏 2.78MB PDF 举报
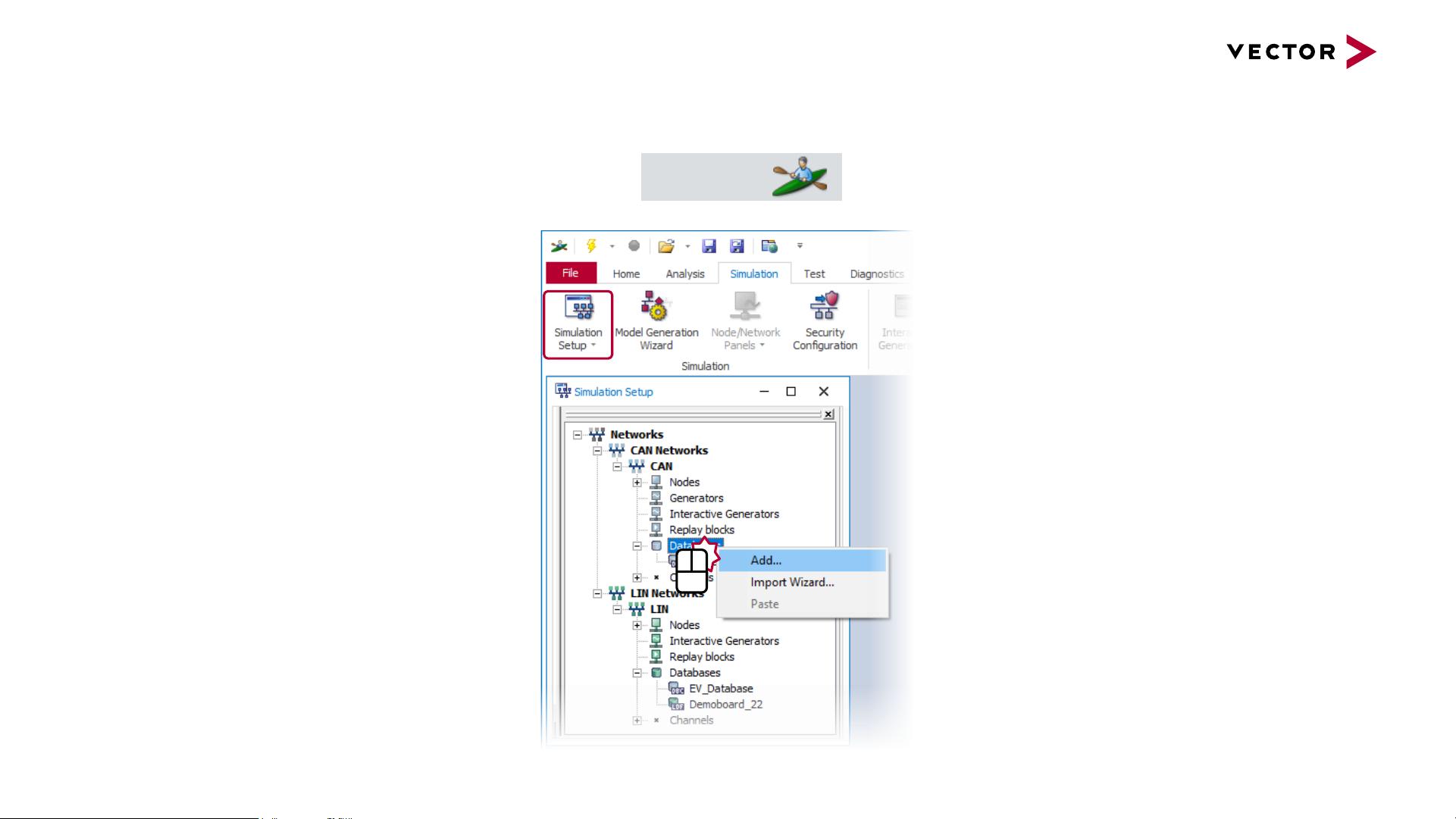
"本资源是一份关于LIN总线的入门教程,名为'LIN_01_EinfuehrungCANoe.LIN_Compact',针对CANoe软件的使用以及LIN(Local Interconnect Network)车载网络技术。文档适用于V12.0.03版本,发布日期为2020年2月2日。教程内容包括CANoe的基础介绍、LIN Workshop-Compact的概述、LDF(LIN Description File)的构建和使用,如LDF Explorer中的信号分析、帧结构以及信号发送与仿真。
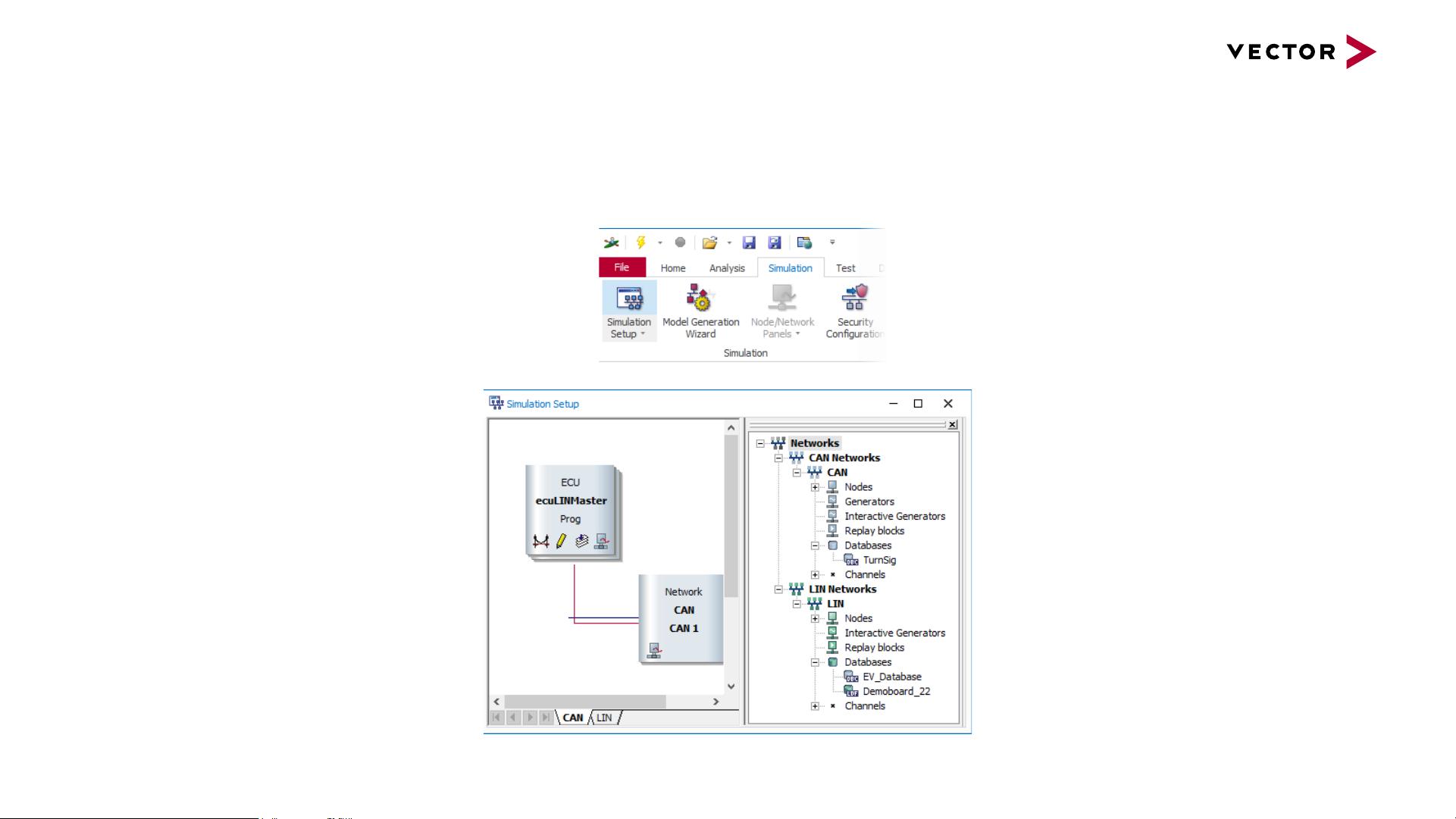
首先,文档介绍了LIN协议的背景,其工作在19.2kbps的波特率范围内,支持2.2版本的LIN语言。LIN网络由节点组成,其中包括一个主节点(ecuLINMaster)和多个从节点(slvMirrorMot1、slvMirrorMot2、slvDoor)。主节点负责控制,而从节点响应和执行命令。
信号部分详细列出了信号的名称、长度、初始值、发送者和接收者。例如,`sigMot1MirrorRight`和`sigMot1MirrorLeft`是两个单比特信号,初始化为0,由ecuLINMaster发送给slvMirrorMot1;而`sigMot1MirrorSpeed`和`sigMot1MirrorIsPosition`则是8比特信号,用于传输更复杂的数据,如电机速度和位置状态。此外,文档还涉及到了事件传输信号如`sigMot1MirrorErrorState`,以及定期或偶然发送的信号如`sigMot1MirrorSetPos`。
帧结构部分描述了帧的命名、标识符、发布者以及信号在帧内的位置。这有助于理解和配置CANoe如何组织和发送数据包,确保数据的有效传输。
通过这份教程,读者可以学习到如何在CANoe中设置LIN网络环境,创建和编辑LDF文件,进行信号模拟和测试,这对于从事汽车电子系统开发的工程师来说是非常实用的参考资料。无论是初学者还是经验丰富的开发者,都可以从中获得LIN总线及其应用软件的深入理解。"
196 浏览量
2023-12-09 上传

车载诊断技术
- 粉丝: 8117
 我的内容管理
展开
我的内容管理
展开







最新资源
- 探索Eclipse下的SWT:跨平台GUI开发的解决方案
- 探索程序问题:echo、@、Goto等工具在垃圾信息中的应用与注意事项
- JasperReports终极指南:报表设计与开发
- 基于微分几何理论的混沌同步研究
- 微分几何驱动的飞机登机策略优化
- C# 将 DataTable 数据导出为 DBF 文件
- Eclipse教程:详解如何使用WTP开发Web服务
- GCC中文手册:Linux开发必备
- 揭秘嵌入式操作系统:必备知识点与应用优势
- PHP初学者指南:简易分页实现
- ExtJS2.0入门与实战教程:提升Web应用体验
- EasyJWeb:企业级Java Web开发框架解析
- 华为网络实验手册:打造计算机网络实战能力
- 理解IoC与Dependency Injection:控制反转与组件装配
- 主题重要性与专题搜索策略:魏本洁的研究
- Adobe Flex工作原理与首个应用开发简介
