非线性干扰观测器在船舶编队控制中的应用
版权申诉
114 浏览量
更新于2024-06-27
收藏 1.04MB DOCX 举报
"基于非线性干扰观测器的船舶编队控制方法"
在当前的海洋工程领域,单艘动力定位船舶已经难以满足复杂的海洋作业需求,多艘动力定位船的编队控制成为了解决这一问题的关键技术。船舶在海上作业时,会遭受风、浪、流等不可预测的环境干扰,这些干扰严重影响了船舶的定位精度。为了提高编队控制的效率和准确性,研究如何有效估计和补偿这些环境干扰至关重要。
文献[1]采用了自抗扰控制技术,通过未建模扰动因素的估计和补偿,来增强控制系统的稳定性。文献[2]则利用自适应在线逼近技术和径向基神经网络,设计了一种控制器,可以估计时变且不确定的海洋环境干扰。文献[3-4]则借助自适应模糊控制方法,逼近并处理未知环境干扰,以应对模型不确定性的问题。文献[5]通过滑模控制技术,使得干扰观测器的估计误差在有限时间内达到扰动的固定倍数范围内。文献[6-7]分别应用非线性扩展状态观测器和干扰观测器来估计未知时变环境扰动,确保观测误差保持在一定界限内。
在非线性系统的控制设计中,不仅需要处理不确定的环境干扰,还需要关注系统的动态响应品质。文献[8]提出了漏斗法,根据漏斗形状调整系统瞬态响应速率,但这种方法在误差接近边界时可能导致控制增益无限增大。文献[9]则引入了预设性能控制的概念,限制系统输出误差在任意设定范围内,提高了系统的鲁棒性和控制效率。文献[10]针对高阶非线性系统,提出了一种基于网络拓扑的带预设性能的编队自适应控制方法。文献[11]则针对水面船只的轨迹跟踪控制,使用自适应神经输出反馈控制,确保跟踪误差保持在预定义的范围内。
基于上述研究,本文针对多动力定位船舶在未知时变干扰环境下的编队控制问题,设计了一种非线性干扰观测器,能快速收敛并准确估计不确定扰动。接着,结合船舶间的通信拓扑结构,运用反步法设计分布式编队控制器,以补偿环境干扰。同时,通过引入响应速度函数,将跟踪误差转换,从而实现期望的跟踪性能水平。最后,通过仿真验证了所提出的控制策略在实际应用中的有效性。
本文的工作为多动力定位船舶的编队控制提供了新的思路,特别是在面对复杂海洋环境干扰时,能够实现更精确的编队控制,提升了作业效率和安全性。通过非线性干扰观测器的设计和分布式控制器的应用,有望在未来海洋工程中发挥重要作用。
式中:η
i
=[x
i
y
i
ψ
i
]
T
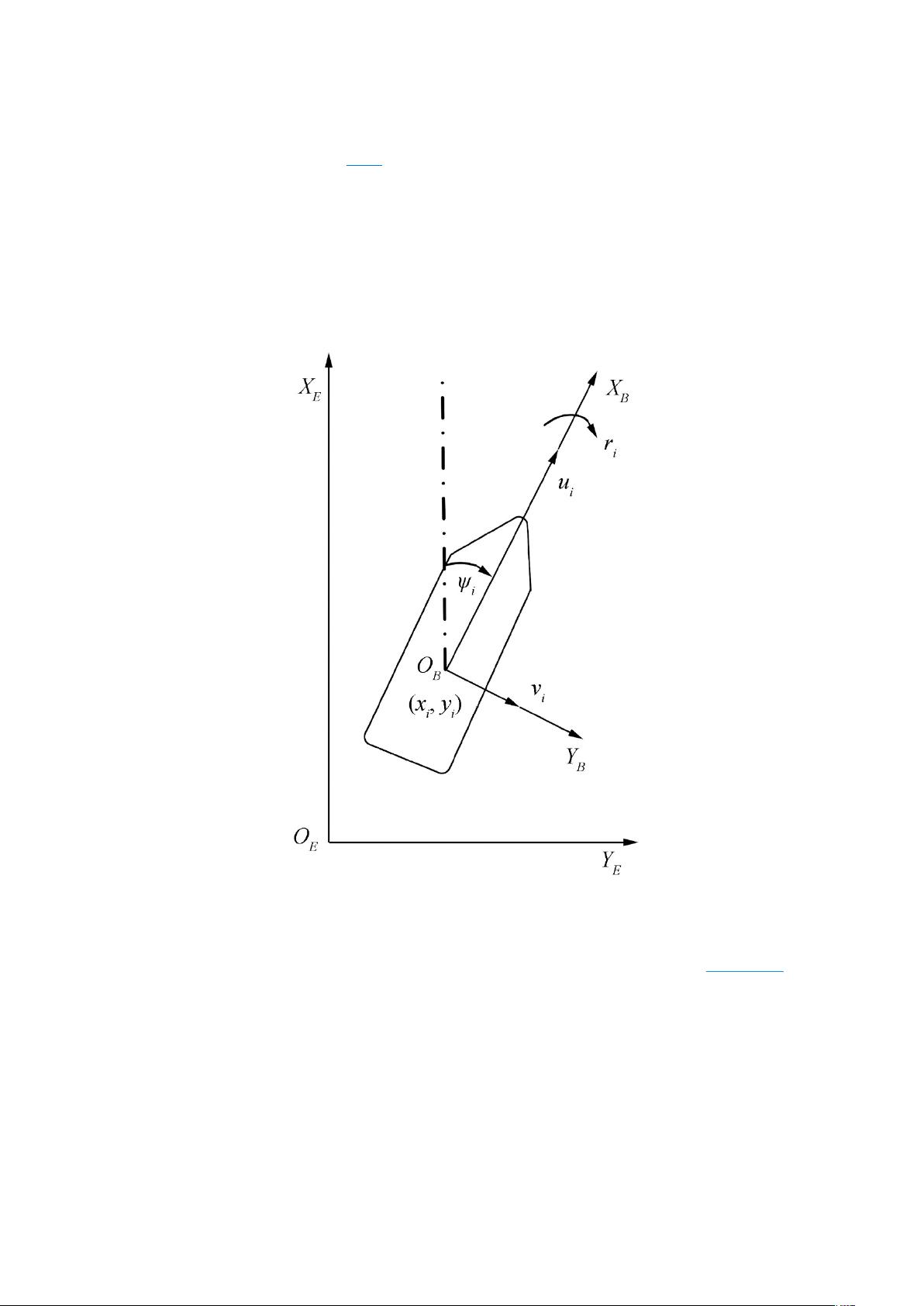
表示第 i 个动力定位船在大地坐标系 X
E
O
E
Y
E
中的方位坐标,包含纵向
和侧向位置以及艏向角信息(如图 1 所示);υ
i
=[u
i
v
i
r
i
]
T
是第 i 个动力定位船的速度和角速度在船
体坐标系 X
B
O
B
Y
B
的坐标;M
i
为船舶惯性矩阵,由船舶质量、附加质量和惯量矩阵组成,是正
定对称阵,且满足 M˙iM˙i=0;D
i
是船舶阻尼矩阵,亦为正定对称阵;τ
i
表示船舶推进系统产生
的推力和力矩;τ
iw
代表风、浪、流对船舶造成的总时变干扰;R(ψ
i
)为从船体坐标系到大地坐标
系的转换矩阵, 满足‖R(ψ
i
)‖=1、R
T
(ψ
i
)R(ψ
i
)=I
3
, 且有 R˙R˙(ψ
i
)=r
i
R(ψ
i
)S, 其中:
R(ψi)=⎡⎣⎢cosψisinψi0−sinψicosψi0001⎤⎦⎥R(ψi)=[cosψi−sinψi0sinψicosψi0001]
S=⎡⎣⎢010−100000⎤⎦⎥S=[0−10100000]
图 1 船舶运动坐标系
Fig. 1 Coordinate systems that describe ship motion
下载: 全尺寸图片
为方便下文书写,用符号 R
i
代表 R(ψ
i
)。
控制目标:针对每艘动力定位船设计分布式控制律,使船在时变环境干扰作用下能保持期
望队形,并按照期望性能跟踪虚拟领航船,即参考信号 η
d
。
本文的分析和设计工作用到以下假设条件。
假设 1 至少存在一条从虚拟领航船到每艘跟随船的有向路径。
剩余14页未读,继续阅读
202 浏览量
613 浏览量
点击了解资源详情
2023-02-23 上传
2024-08-31 上传
134 浏览量
2024-08-31 上传
130 浏览量
2022-11-04 上传

罗伯特之技术屋
- 粉丝: 4525
 我的内容管理
展开
我的内容管理
展开







最新资源
- RabbitMQ订阅模式压力测试与性能分析
- 配套网页设计的图片资源压缩包
- SpringBoot集成Mybatis与Quartz的高级技术应用
- Matlab编辑器文件自动恢复功能实现
- Rust宏:const_random! 在编译时生成随机常量
- 使用pandas实现Excel数据操作与分析教程
- OpenCv2在C++中的应用与实践指南
- UCB算法与程序设计课程主要内容概述
- 易语言JSON模块修改版特性解析及使用
- Vivado环境下ZedBoard上实现PL流水灯教程
- TeXPower开源软件:动态LaTeX在线演示解决方案
- 全面解析开发套件:CLI与Angular SDK
- MySQL国家行政代码包,数据库开发者的福音
- 笔记本端一键开启WiFi热点共享技巧
- Matlab环境配置:启动脚本与日记功能
- 火星车导航优化与通信自检技术研究
