误差状态卡尔曼滤波器在多传感器融合车辆里程计中的应用
版权申诉
"本文主要探讨了一种基于多传感器融合的车辆里程计系统设计,该系统利用误差状态卡尔曼滤波器(ESKF)进行状态估计,结合惯性测量单元(IMU)、轮速编码器和GPS等多种传感器数据,以实现高精度的实时定位。通过深入研究传感器模型和测量原理,建立了误差模型,为滤波器的预测和更新方程提供了理论支持。此外,文中还介绍了数据处理策略,包括时空同步和异常值预处理,以确保数据质量。为了提升里程计系统的精度,提出了静态和动态零速修正方案,以及改进的初始化方法。在KAIST城市数据集上进行了系统测试,并与传统方法进行了比较,结果证明本文的方法在定位精度上具有优势。"
在自动驾驶领域,车辆里程计系统扮演着至关重要的角色,它需要提供准确、稳定的车辆位置和姿态信息。传统的单传感器定位方法往往存在精度不足或稳定性差的问题,因此,多传感器融合成为了解决这一问题的有效途径。误差状态卡尔曼滤波器(ESKF)作为一种高级的状态估计方法,能够有效地融合不同传感器的数据,减小估计误差。
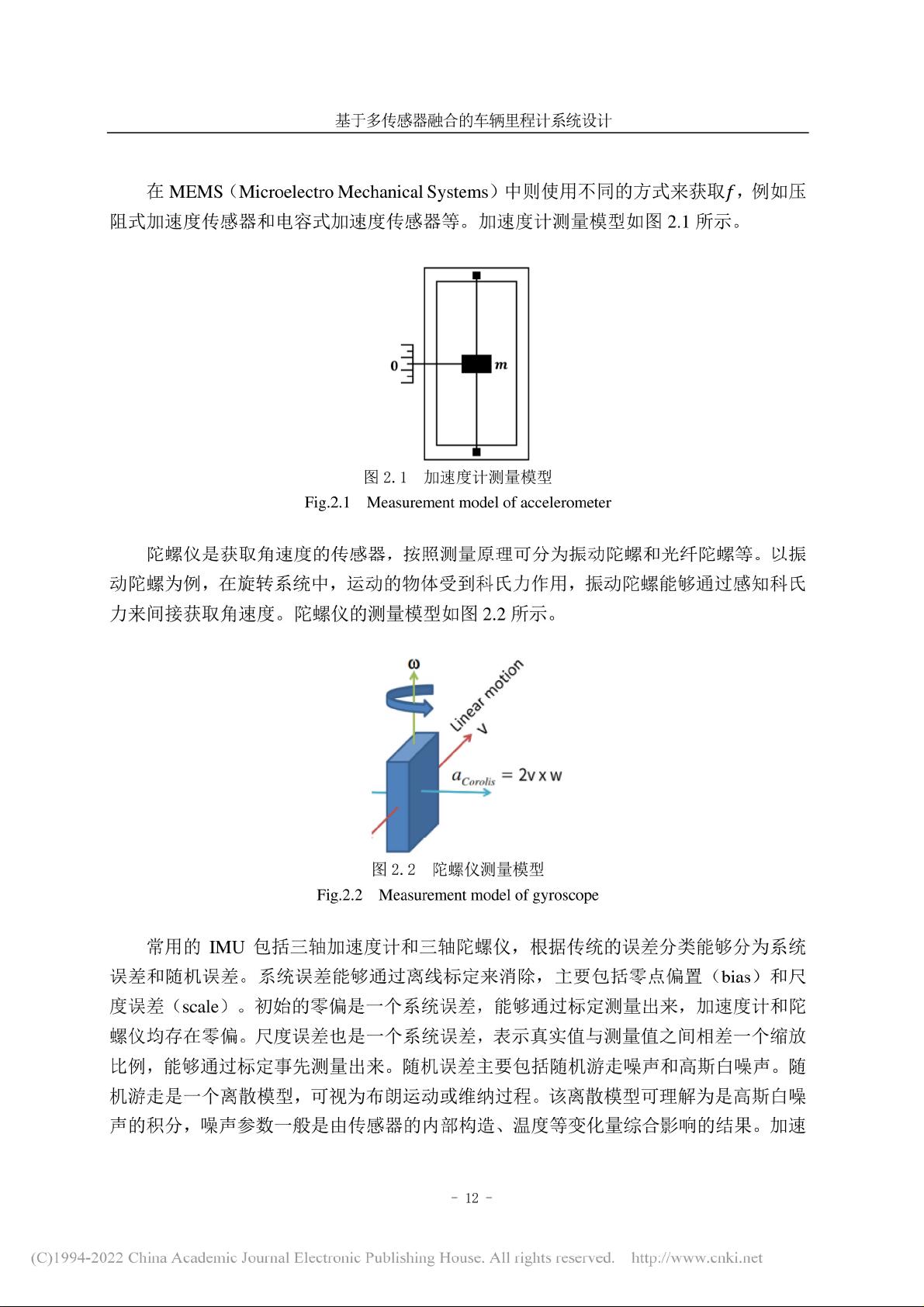
本文的核心是构建一个基于ESKF的车辆里程计系统。系统中,IMU用于连续地提供车辆的状态预测,如加速度和角速度,这些信息经过积分可以得到位置和姿态的预测。而轮速编码器和GPS则在特定时刻提供位置和速度的精确测量,作为状态更新的输入。通过对传感器的误差模型进行建模,可以更好地理解和校正由传感器噪声和漂移引起的误差,从而提高整体定位的准确性。
在数据处理方面,时空同步确保了来自不同传感器的数据在同一时间戳下进行融合,避免了因时间不同步导致的误差。异常值预处理则有助于去除可能干扰系统性能的异常数据,提高系统的鲁棒性。同时,通过利用多传感器的互补性,优化了系统的初始化过程,使得里程计在启动时能更快地达到稳定状态。
静态和动态零速修正方案是针对车辆静止或低速行驶时可能出现的定位漂移问题而提出的。在静态情况下,可以通过车辆运动学模型来校正位姿估计;在动态情况下,结合车辆的加速度信息,可以进一步提高零速时刻的定位精度。
实验部分,作者在KAIST城市数据集上对所设计的里程计系统进行了测试,通过对比原始轮速里程计和基于MSCKF的里程计系统,验证了本文方法在定位精度上的优越性。这表明,所提出的多传感器融合策略和优化技术确实提高了里程计系统的性能,为自动驾驶的安全性和可靠性提供了有力保障。
关键词:多传感器融合;里程计;状态估计;误差状态卡尔曼滤波器;自动驾驶;定位精度
2021-08-14 上传
2021-05-24 上传
2021-08-14 上传
2024-10-27 上传
2024-10-27 上传
2024-10-28 上传
2024-11-10 上传
2024-10-27 上传
2024-11-10 上传

电气_空空
- 粉丝: 5083
- 资源: 1319
 我的内容管理
展开
我的内容管理
展开







最新资源
- 深入了解Django框架:Python中的网站开发利器
- Spring Boot集成框架示例:深入理解与实践
- 52pojie.cn捷速OCR文字识别工具实用评测
- Unity实现动态水体涟漪效果教程
- Vue.js项目实践:饭否每日精选日历Web版开发记
- Bootbox:用Bootstrap实现JavaScript对话框新体验
- AlarStudios:Swift开发教程及资源分享
- 《火影忍者》主题新标签页壁纸:每日更新与自定义天气
- 海康视频H5player简易演示教程
- -roll20脚本开发指南:探索roll20-master包-
- Xfce ClassicLooks复古主题更新,统一Linux/FreeBSD外观
- 自建物理引擎学习刚体动力学模拟
- Python小波变换工具包pywt的使用与实例
- 批发网导航程序:自定义模板与分类标签
- 创建交互式钢琴键效果的JavaScript库
- AndroidSunat应用开发技术栈及推介会议
