OpenCV Viz:模拟单目相机标定与内参数设置
需积分: 0 160 浏览量
更新于2024-08-05
收藏 747KB PDF 举报
在OpenCV的Viz模块中,单目相机标定模拟是一个实用且有趣的实践项目。它主要涉及对相机的内参数进行设置和操作,以及利用这些参数来模拟标定过程。首先,理解相机的内参数至关重要,这包括焦距(fx, fy)、光心坐标(x0, y0)和像距(p)等,这些参数决定了图像的几何特性。
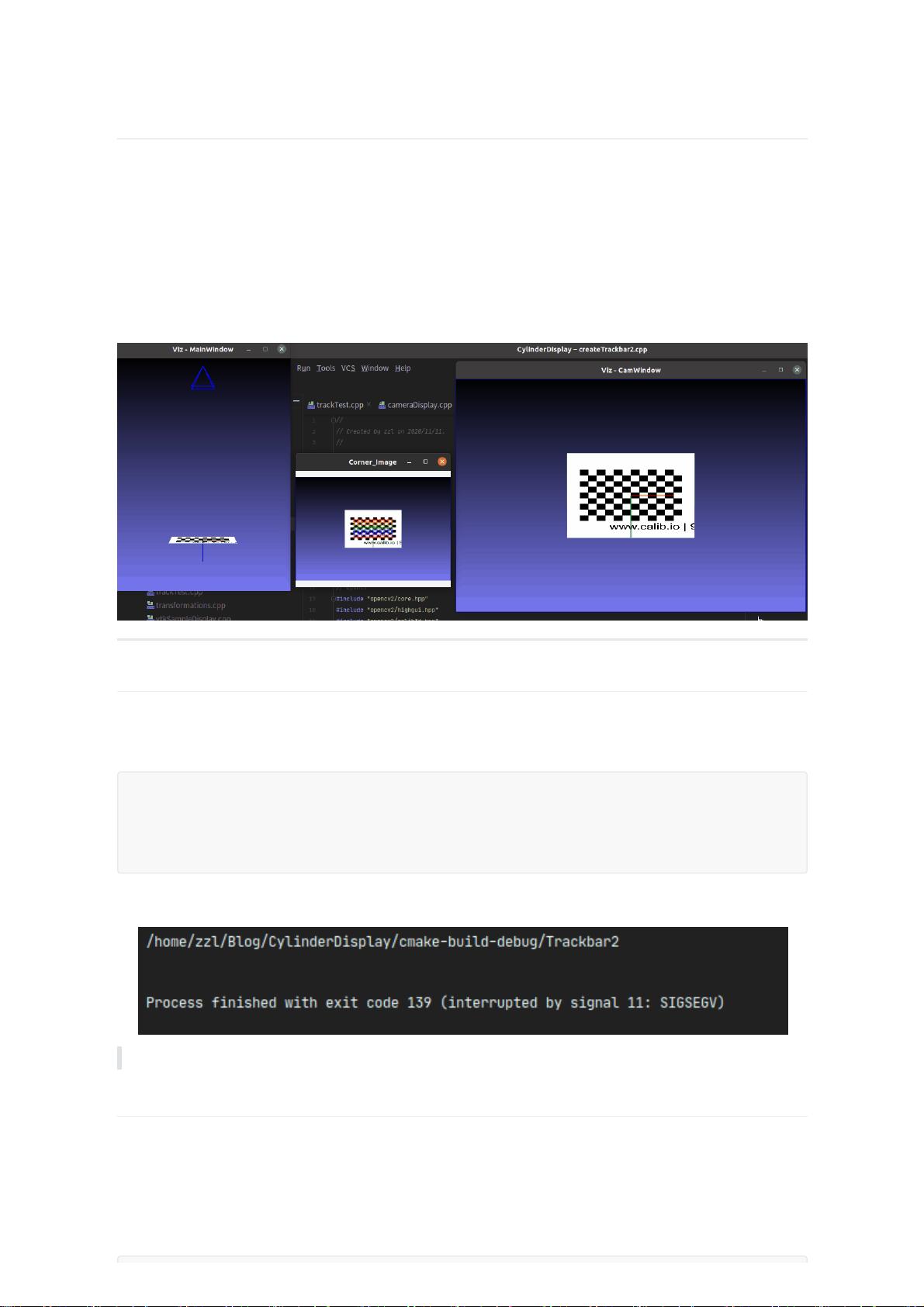
在项目的初始化阶段,你需要创建两个窗口:一个是从“上帝视角”观察标定板的主窗口(MainWindow),另一个是模拟相机视图的相机窗口(CamWindow)。这两个窗口都需要通过spinOnce()函数定期更新,否则可能会遇到程序崩溃的问题,如Segmentation Fault (SIGSEGV)。
接下来,你需要配置相机的参数。这包括设置相机的内参数矩阵,如焦距和视场角,以及相机的位置和方向。这些信息通过`viz::Viz3dmainWindow`和`viz::Viz3dcamWindow`类的实例化,并通过setCamera方法传递。相机的位置通常定义为一个Affine3f对象,表示其相对于世界坐标系的距离和角度。
标定板的图像被加载并在两个窗口中显示,其大小应与实际尺寸匹配,而不是像素大小。标定板的旋转和缩放可能会影响角点检测的准确性,这也是造成标定误差的一个因素。为了模拟标定过程,会在相机窗口中实时获取和显示当前的观测位姿,并在主窗口中通过取反观测位姿来计算标定板的位姿。
角点检测是标定的关键步骤,通过创建一个专门的窗口(Corner_Image)来展示这一过程。在这个过程中,通过调用`getViewerPose`函数获取相机的实时姿态,然后在标定板图像上显示角点,以便进行进一步的分析和调整。
OpenCV的Viz模块提供了一个直观且灵活的环境,用于演示和实验相机标定技术。通过这个模拟,学习者可以深入理解相机参数的含义,以及它们如何影响图像处理和标定结果。同时,它也强调了实际标定过程中可能出现的问题及其潜在原因,有助于提升理解和实践能力。
单目相机标定模拟
基于OpenCV中的Viz模块,虚拟一个相机,设置相机的内参数。然后在相机视野下放置标定板,通过相
机标定算法,最终再获取相机内参数。
当然最终相机标定还是存在误差,我猜测主要原因是标定板旋转在变换的过程中,仿射变换导致图像质
量下降,角点提取的不准确。
当然,这个项目的主要意图还是示意吧,重点在于自己创造数据,虚拟数据。
效果图:
创建窗口
第一步就是创建窗口。一个窗口为主窗口(从上帝视角看标定板的位置),还有一个窗口为相机窗口
(相机所获取的图像)。
值得一提的是,在每个窗口都执行了一次spinOnce()的函数。若不更新这个窗口,会莫名报错误:
Process finished with exit code 139 (interrupted by signal 11: SIGSEGV)
初始化相机
初始化相机主要包括:
1. 相机的内参数
2. 相机的朝向(WCameraPosition)
3. 相机的位置(Affine3f),相对于世界坐标系的位置
viz::Viz3d mainWindow("MainWindow"); // 创建主窗口
viz::Viz3d camWindow("CamWindow"); // 创建相机窗口
mainWindow.spinOnce(); // 初始化
camWindow.spinOnce(); // 初始化
下载后可阅读完整内容,剩余5页未读,立即下载
447 浏览量
363 浏览量
2020-02-01 上传
143 浏览量
424 浏览量
225 浏览量
2021-05-10 上传
2019-01-22 上传
180 浏览量









