全国大学生智能汽车竞赛直立行车设计方案
"直立车参考方案"
这篇文档是关于第七届全国大学生"飞思卡尔"杯智能汽车竞赛电磁组直立行车的一个详细设计方案,版本2.0。方案涵盖了从理论到实践的各个环节,包括平衡控制、速度控制、方向控制等多个关键方面。
在原理篇中,文档首先介绍了直立行走任务的分解,将控制问题分为保持直立和移动两部分。接着,讨论了车模直立控制,通过分析车模倾角和车速之间的关系,展示了三层控制结构(即速度控制、平衡控制和方向控制)如何协同工作。加速度计和陀螺仪在此过程中扮演了重要角色,用于测量车模的角度和角速度。
在车模角度和角速度测量中,文档提到了MMA7260三轴加速度传感器的原理和应用,以及角速度传感器的工作机制,这些传感器的数据被用来实时监测车模的状态并进行反馈控制。车模速度控制则涉及电机驱动电路和速度传感器电路的设计,确保车模能按照预设的速度稳定行驶。
车模方向控制部分详细阐述了如何通过调整车轮转速来改变行进方向。角度计算电路和车模控制电路全图揭示了整个系统的硬件布局。
机械设计篇讨论了车模的改装和传感器安装,包括如何简化车模结构以优化性能,并确保传感器能准确捕捉到必要的数据。软件开发篇则详细介绍了软件框架、硬件资源配置以及主要算法的实现,如PID控制器的运用。
车模调试篇是实践环节,列出了调试参数、调试条件,以及桌面静态和现场动态两种环境下的参数调试方法。最后,方案改进与车模整体水平提高部分提出了进一步提升性能的策略。
总结起来,这个直立车参考方案提供了从理论到实践的全面指导,对理解直立车的控制系统设计、硬件选择和软件实现具有很高的参考价值。它涉及的飞思卡尔技术、传感器应用和控制算法等内容,对于学习智能车辆控制和嵌入式系统开发的学生或工程师来说,是非常宝贵的资料。
k
1
k
2
适当的类比和想
象,可以使我们
更容易理解控制
原理。
图 2‐10 车模控制两个系数作用
在上面简单分析中,通过类比倒立摆得到了车模直立的控制方案。下面对倒立车模
进行简单数学建模,然后建立速度的比例微分负反馈控制,根据基本控制理论讨论车模
通过闭环控制保持稳定的条件。
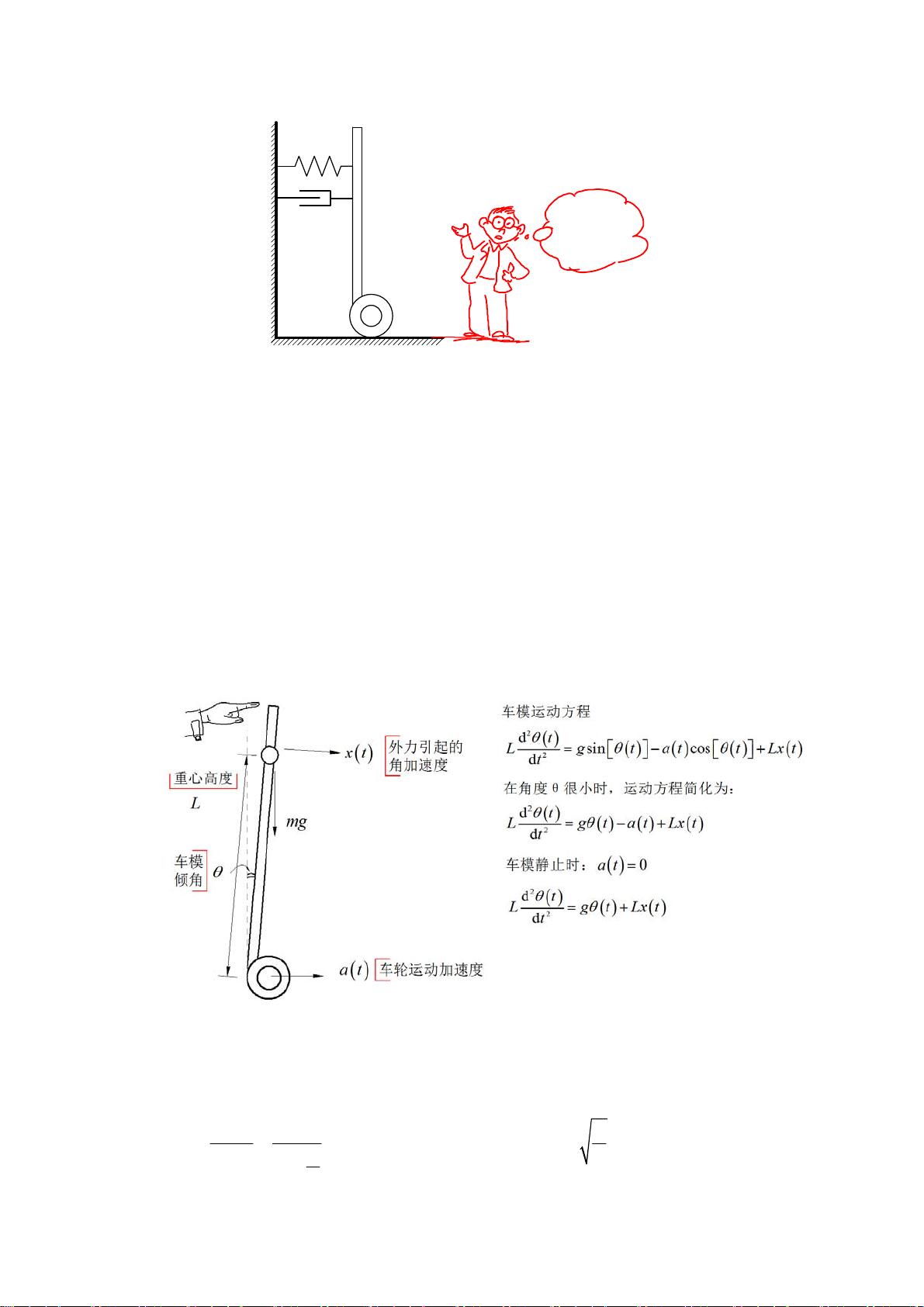
假设倒立车模简化成高度为 L,质量为 m 的简单倒立摆,它放置在可以左右移动的
车轮上。假设外力干扰引起车模产生角加速度 ()
x
t 。沿着垂直于车模地盘方向进行受力
分析,可以得到车模倾角与车轮运动加速度 以及外力干扰加速度()at ()
x
t 之间的运动方
程。如图 2-11 所示。
图 2‐11 车模运动方程
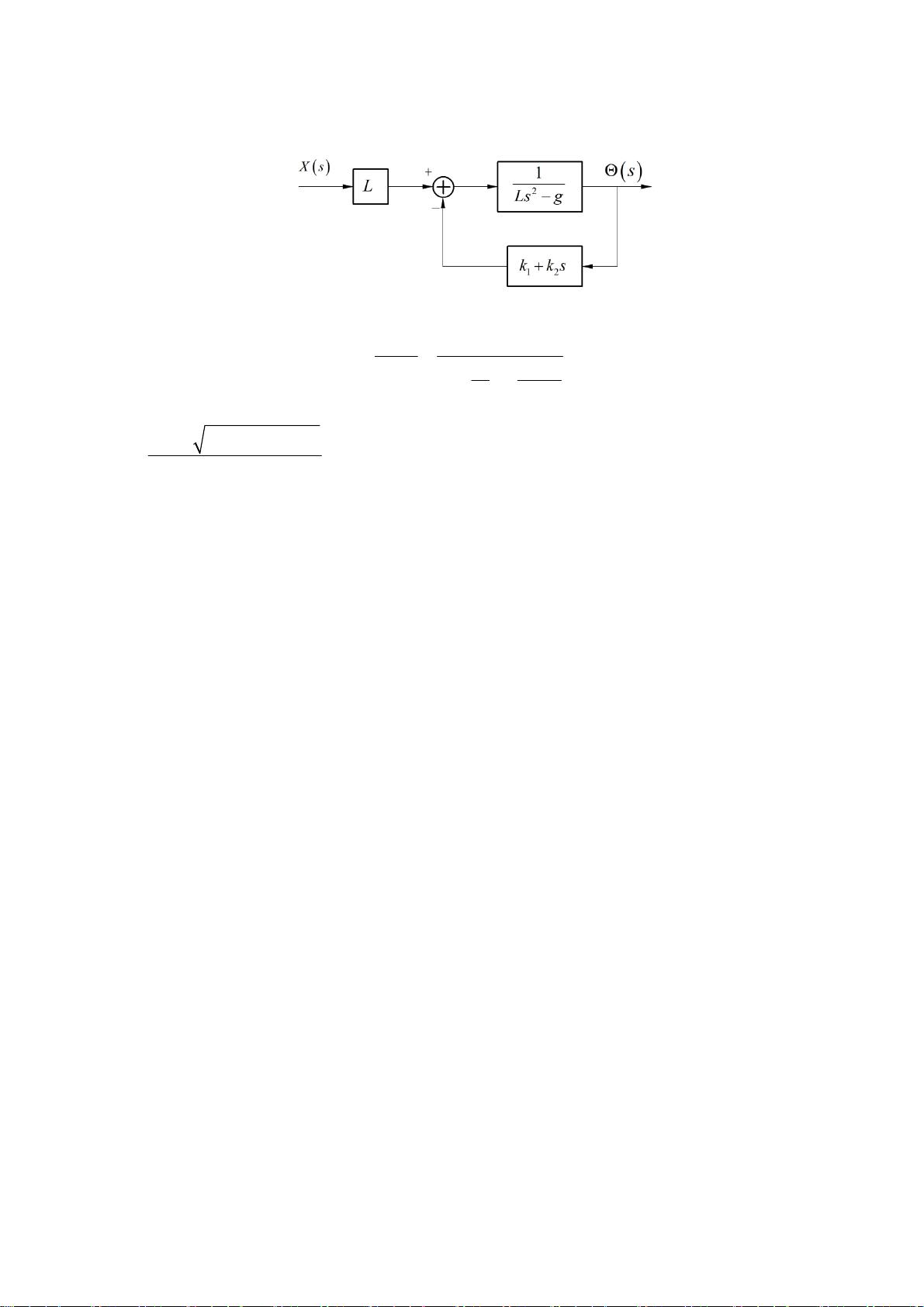
对应车模静止时,系统输入输出的传递函数为:
()
()
()
2
1
s
Hs
g
Xs
s
L
Θ
==
−
,此时系统具有两个极点
p
g
s
L
=±
。一个极点位于 s 平面的
16

剩余107页未读,继续阅读
点击了解资源详情
161 浏览量
点击了解资源详情
109 浏览量
352 浏览量
2024-04-15 上传
158 浏览量
332 浏览量
214 浏览量

xujihu
- 粉丝: 1
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- compile-composer:自动编译 composer
- STM32G431小系统核心板原理图PCB
- 颁奖典礼PPT合集1.rar
- adb&fasoboot调试工具包
- ULTRAMAT 23 红外气体分析仪.zip
- 实践2
- 头盔弹丸:用于头盔的头盔UI
- Module-export:更新代码
- 易语言源码ACCESS到高级表格.rar
- UDAT4.06.rar
- java课程设计作业:基于Java的打地鼠小游戏.zip
- 苏州迅鹏WP-MMB信号发生器.zip
- 基于PCB的去膜、碱腐、晶亮工艺指导书.zip
- cloudlet-platform
- 马尔可夫方法构建汽车行驶工况的matlab代码.rar
- ULTRAMAT 6 红外气体分析仪.zip
