安徽省机器人大赛程序设计:机器人足球与纸牌识别
需积分: 14 9 浏览量
更新于2024-07-15
3
收藏 2.38MB DOC 举报
"合工大程序设计小组作业答案包括2019年安徽省机器人大赛中的多个项目,如机器人足球、纸牌识别等。作业涉及算法设计和编程实现,旨在提升参赛者的程序设计能力。"
在题目A“机器人足球”中,主要考察的是几何和最优化问题。机器人位于长100、宽20的足球场内,初始位置为(x, y),目标是找到从当前位置到球门(坐标为(100, 10))的最短射门路径。当机器人与球门的距离不超过10时,可以射门。解题的关键是理解,当机器人与球门的距离大于10时,最短路径是通过以球门中心为圆心、半径为10的半圆上的点,此时最小移动距离等于机器人到球门直线距离减去半径10。如果机器人已经在半圆内,最小距离为0。提供的C++代码实现了这个算法,通过输入点的坐标计算距离,并判断是否需要移动以及移动的距离。
在题目B“纸牌识别”中,任务是编写一个程序检查一副扑克牌是否完整。每张纸牌由花色(P, K, H, T分别代表梅花、方片、红桃、黑桃)和数字点数(1-13)组成,数字可能需要补0。用户将输入一个字符串,表示缺失的纸牌。程序需要分析输入,确认每种花色的1-13数字是否齐全,共有52张牌。这需要对字符串处理和数据结构(如集合或映射)有深入了解,以便跟踪已出现的纸牌并检测缺失的牌。
这两道题目都要求参赛者具备扎实的算法基础,熟悉几何问题的求解方法,以及良好的编程技巧,能够根据问题描述正确地设计和实现解决方案。同时,它们也锻炼了选手在实际问题中应用数学和编程知识的能力。

D
G-
!D
输出:输出从 走到 D 最少受到多少次警告
解题思路:
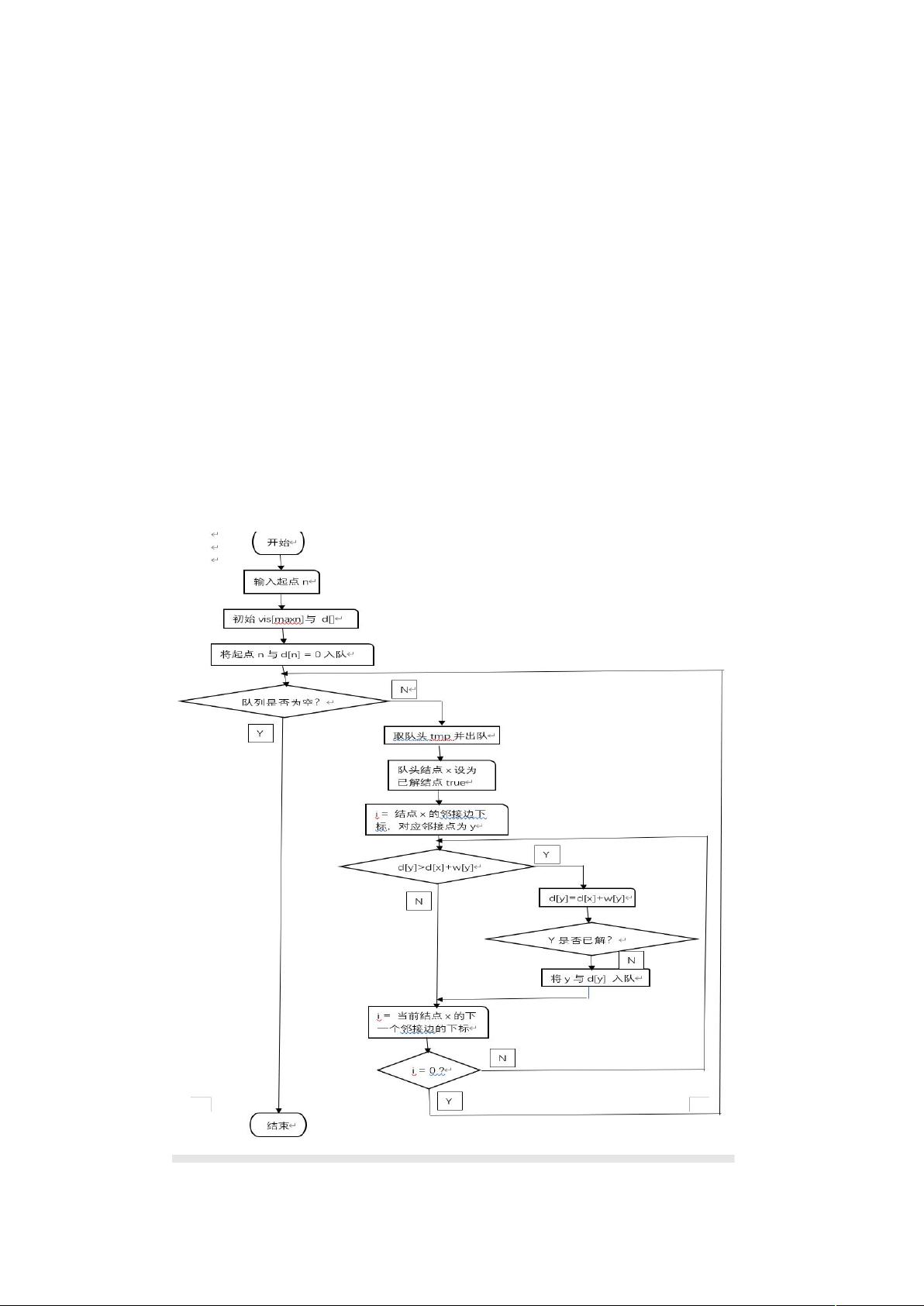
这道题目使用的搜索题目,寻找图论中两点间的最短路径问题,利用
IJF 算法。计算出分别按照两个导航软件计算出的从起点到终点的最短路
径,然后在利用已求出的两条最短路径,遍历计算每条道路上可能的报警数,
再次利用 IJF 算法计算出从起点到终点的报警数最少的路径,因此磁导体
的关键便是三次 IJF 计算和报警数的统计。
具体解法:
首先该题目需要使用 IJF 算法,因此需要将城市间的道路信息转化为
图模型存储起来。图的数据结构大概可以分为三种邻接矩阵、邻接表、链式向
前星,而前两种内存占用和信息交互都不方便,因此选择方便简洁的链式向前
星。
如图 I一所示结构,
图 I一
找以 数组下标 为邻接起点的邻接点,先由数组元素得到第一条邻接边
的数组下标“-K,找到该数组下标对应的元素位置,然后对其进行相应操作后,
判断 对应值是否为零,若为零则表示所有的邻接点都已经遍历结束,否
则找到元素值为下标对应的位置继续上一步操作。
解决了图的数据结构后,我们可以两次利用 IJF 算法(:从图中一个
指定的顶点到其余各顶点之间的最短路径的求解方法,求解思想是按最短路径
长度不减的次序求解各顶点的解,即按由近到远的次序递推求解各顶点的距
离)计算得到 G和 这两个不同的导航软件中从当前位置 到目
标位置 所需 的最短时间 , 。
剩余48页未读,继续阅读
230 浏览量
点击了解资源详情
531 浏览量
2022-03-13 上传
400 浏览量
698 浏览量
230 浏览量
966 浏览量









