RobotStudio仿真技术:工业机器人系统的创建与操作
版权申诉
5 浏览量
更新于2024-07-04
1
收藏 29.31MB PPTX 举报
该资源是一份关于建立机器人系统和软件操作的教程,主要涉及RobotStudio仿真技术知识,包括系统生成、软件窗口操作、工业机器人离线编程与仿真等内容。
在工业机器人领域,建立机器人系统是至关重要的一步。RobotStudio是一款强大的仿真软件,它基于VirtualRobot Technology,能够精确复制现实中的机器人控制器,允许用户在电脑上进行离线编程和仿真。在开始任何工作之前,必须先在RobotStudio中创建一个系统,这是因为这个系统相当于实际工作站的基础,没有系统,就无法进行参数配置、数据处理、编程等操作。
系统主要由以下几个节点组成:
1. **机器人本体**:包括机身、臂部、手腕、末端操作器(EOAT)和行走机构等,每个部分都有一定的自由度,使得机器人能够灵活移动和操作。
2. **驱动系统**:提供动力,使机器人各关节运动,通常包括电动马达、液压或气压驱动装置。
3. **控制系统**:负责处理机器人的指令,执行运动控制、IO配置、程序编辑等功能,如ABB的Smart控制系统。
4. **感知系统**:通过各种传感器(如编码器)获取机器人和环境的信息,确保精确运行。
创建系统有多种方法,可以是从布局创建,即根据实际工作站的布局在软件中构建;也可以是从备份恢复,适用于已有系统配置的情况。在建立系统的过程中,用户需要了解并掌握软件窗口的各种快捷操作,以便高效工作。例如,设置工作区域、显示选项、物体选择和视图操作等。
此外,工作站的打包和解包功能允许用户保存和传输整个工作配置,这对于协作和项目转移非常有用。软件环境的设置也很关键,因为它直接影响到编程和仿真的效率和准确性。
通过学习这份教程,用户将能够:
- 根据工作需求选择合适的系统建立方式。
- 设置和操作工业机器人软件环境。
- 熟练打包和解包工作站文件。
- 掌握鼠标在3D空间中选择物体和调整视图的操作技巧。
控制柜在机器人系统中扮演着核心角色,它包含了驱动和控制机器人的所有硬件组件,如电源、电机驱动器、I/O模块等。控制柜的主要作用是接收和处理来自示教器的指令,同时控制机器人动作并反馈状态信息。
这份资料是学习如何在RobotStudio中构建和操作工业机器人系统的宝贵资源,对于理解和实践工业机器人离线编程与仿真有着深远的意义。

课堂导入 新知学习 训练巩固 评价总结
知识应用
知识导图
知识讲解
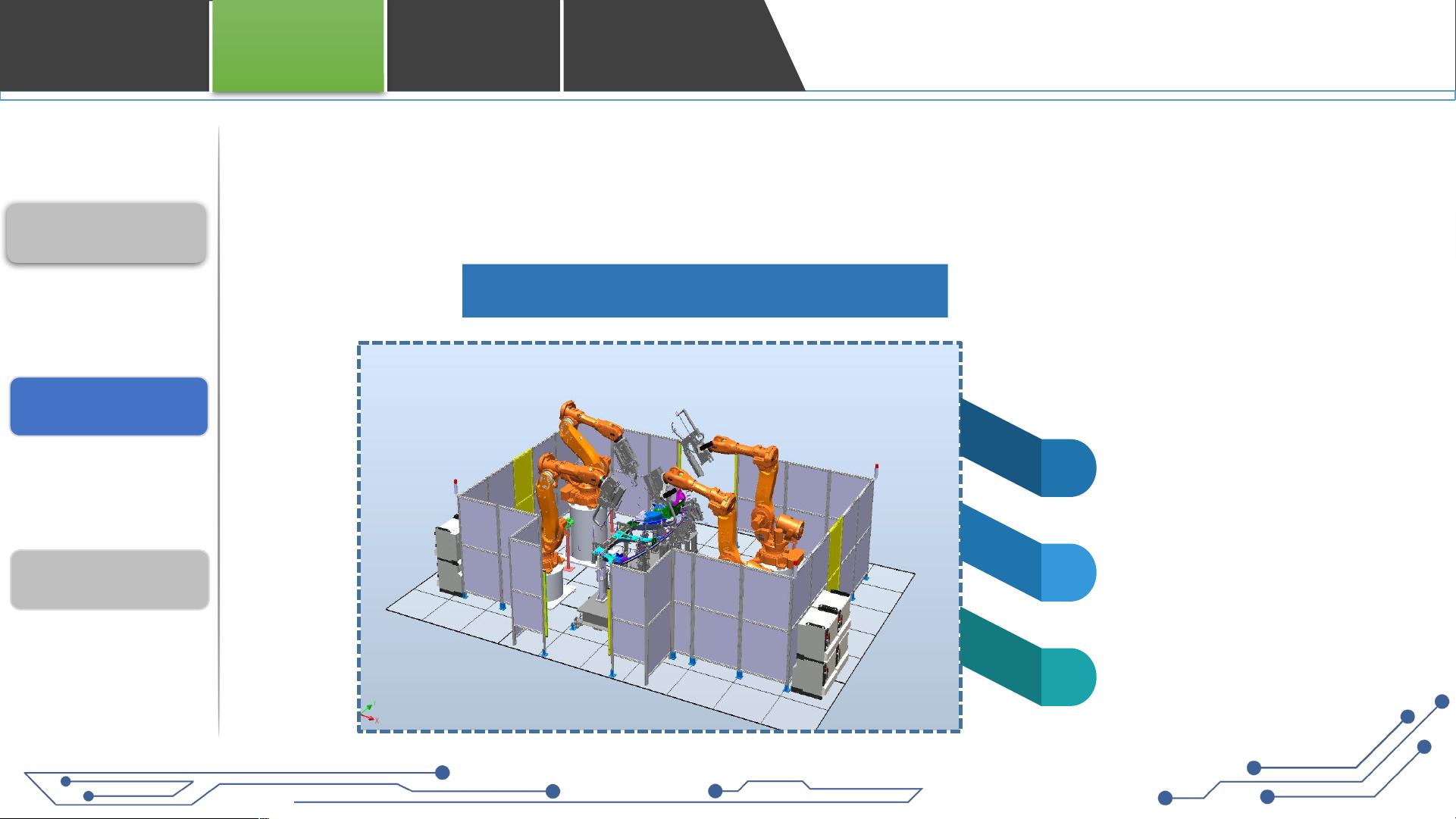
工业机器人系统是机器人进行手动操作, IO 配置,程序编辑,数据处理的必要条件。
一、建立工业机器人系统
1 、为什么要创建系统
无法进行需要计算机正向和逆向
求解的线性运动、重定位运动
无法记录点位和示教编程
无法进行 IO 配置、程序编辑和程序数据处理
如果没有系统
任务 2-1 建立工业机器人系统
剩余46页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-09-25 上传
2021-09-23 上传
2021-10-11 上传
2021-10-08 上传
2022-05-11 上传
2021-10-02 上传

知识世界
- 粉丝: 375
- 资源: 1万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言入门教程
- c#中文教程 适合初学者 讲的很详细
- Visual Studio .NET使用技巧手册
- C++学习编程规则让你成为编程高手中的高手
- Apress.Android.Essentials
- 基于TMS320F2812 DSP与PC机的串口通信设计.txt
- 自己动手写struts
- asp.net丛书系列从零开始学习Ext
- 2005年第23届挑战杯精品集.pdf
- Flex白皮书,中文版的哦
- Auto CAD 快捷键集锦
- 单工串行通信设计 毕业设计论文
- linux_makefile教程
- NET book zero
- tinyOS基础教程
- Effective C++ Second Edition(中文版)
