深度学习中的可分离卷积详解
需积分: 42 97 浏览量
更新于2024-09-07
收藏 314KB PDF 举报
"这篇资源是关于可分离卷积的基础介绍,主要探讨了两种类型的可分离卷积:空间可分离卷积和深度可分离卷积。作者Chi-Feng Wang在2018年的文章中详细解释了这两种技术及其与普通卷积的区别。"
可分离卷积是深度学习领域中一种用于降低计算复杂性和模型参数量的有效方法,特别是在轻量级网络如MobileNet中广泛使用。本文将深入理解可分离卷积的基本概念。
首先,我们来看空间可分离卷积。这种卷积方式的名字来源于其主要处理图像的空间维度,即宽度和高度,而不涉及通道(深度)维度。一个标准的空间可分离卷积会将一个较大的卷积核分解为两个较小的核,通常是将3x3的卷积核拆分为3x1和1x3的两个核。这种分解方式使得网络可以先沿一个方向进行一维卷积,然后再沿另一个方向进行卷积,从而实现原本3x3卷积的效果,但计算量大大减少。然而,空间可分离卷积由于其局限性,在现代深度学习模型中并不常用。
接着,我们转向深度可分离卷积,这是更常见且有效的一种可分离卷积形式。深度可分离卷积由两个连续操作组成:深度卷积(Depthwise Convolution)和点乘卷积(Pointwise Convolution)。深度卷积对每个输入通道独立应用一个卷积核,这意味着如果输入有N个通道,就需要N个不同的1x1卷积核。这一过程减少了计算量,因为每个通道仅需一次乘法运算。之后,点乘卷积(通常是一个1x1的卷积层)将所有通道的结果融合在一起,这相当于一个多通道的线性组合,可以看作是一种非线性的激活函数前的全连接层。深度可分离卷积显著降低了模型的计算复杂度,同时保持了模型的表达能力。
在深度学习模型中,尤其是设计用于移动设备或嵌入式系统的模型,如MobileNet、EfficientNet等,深度可分离卷积因其高效性和准确性而被广泛采用。通过使用这种技术,模型可以在保持性能的同时减小模型大小,从而提高运行速度并降低内存需求,这对于资源有限的环境尤为重要。
可分离卷积是深度学习网络优化的重要手段,它通过分解复杂的卷积操作来节省计算资源,同时保持模型的性能。对于希望深入了解深度学习模型架构优化的读者,理解并掌握可分离卷积的原理与应用是十分关键的。
A Basic Introduction to Separable
Convolutions
Anyone who takes a look at the architecture of MobileNet will
undoubtedly come across the concept of separable convolutions. But
what is that, and how is it different from a normal convolution?
There are two main types of separable convolutions: spatial separable
convolutions, and depthwise separable convolutions.
Chi‑Feng Wang
F
o
ll
ow
Aug 14, 2018
·
8 min read
. . .
Spatial Separable Convolutions
Conceptually, this is the easier one out of the two, and illustrates the
idea of separating one convolution into two well, so I’ll start with this.
Unfortunately, spatial separable convolutions have some significant
limitations, meaning that it is not heavily used in deep learning.
The spatial separable convolution is so named because it deals
primarily with the spatialdimensions of an image and kernel: the
width and the height. (The other dimension, the “depth” dimension,
is the number of channels of each image).
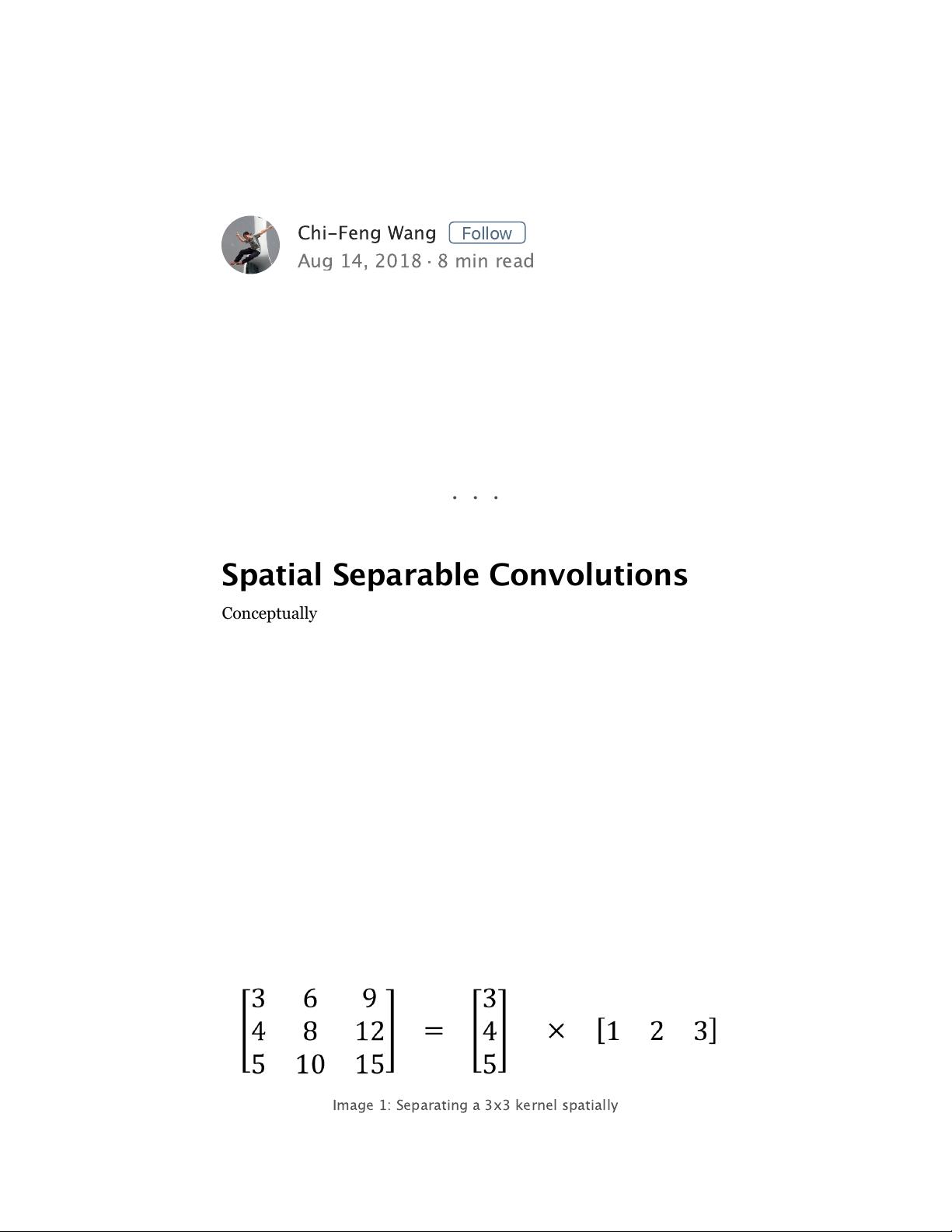
A spatial separable convolution simply divides a kernel into two,
smaller kernels. The most common case would be to divide a 3x3
kernel into a 3x1 and 1x3 kernel, like so:
Image 1: Separating a 3x3 kernel spatially
下载后可阅读完整内容,剩余9页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
点击了解资源详情
2021-07-29 上传
2020-09-23 上传
2021-04-29 上传
2023-09-09 上传
2023-02-23 上传

tox33
- 粉丝: 64
- 资源: 304
 我的内容管理
展开
我的内容管理
展开







最新资源
- Raspberry Pi OpenCL驱动程序安装与QEMU仿真指南
- Apache RocketMQ Go客户端:全面支持与消息处理功能
- WStage平台:无线传感器网络阶段数据交互技术
- 基于Java SpringBoot和微信小程序的ssm智能仓储系统开发
- CorrectMe项目:自动更正与建议API的开发与应用
- IdeaBiz请求处理程序JAVA:自动化API调用与令牌管理
- 墨西哥面包店研讨会:介绍关键业绩指标(KPI)与评估标准
- 2014年Android音乐播放器源码学习分享
- CleverRecyclerView扩展库:滑动效果与特性增强
- 利用Python和SURF特征识别斑点猫图像
- Wurpr开源PHP MySQL包装器:安全易用且高效
- Scratch少儿编程:Kanon妹系闹钟音效素材包
- 食品分享社交应用的开发教程与功能介绍
- Cookies by lfj.io: 浏览数据智能管理与同步工具
- 掌握SSH框架与SpringMVC Hibernate集成教程
- C语言实现FFT算法及互相关性能优化指南
