KEA128芯片驱动的两轮平衡车软件设计与关键技术
版权申诉
106 浏览量
更新于2024-06-21
收藏 1.67MB DOCX 举报
本文档主要探讨了基于KEA128芯片的电磁感应平衡车软件系统设计,这是一种创新且环保的交通工具,尤其受到现代科技发展的推动。近十年来,两轮自平衡车作为一种新兴的个人代步工具,由于其电动驱动、低碳排放、小巧便携等特点,已经在交通出行领域得到了广泛应用。
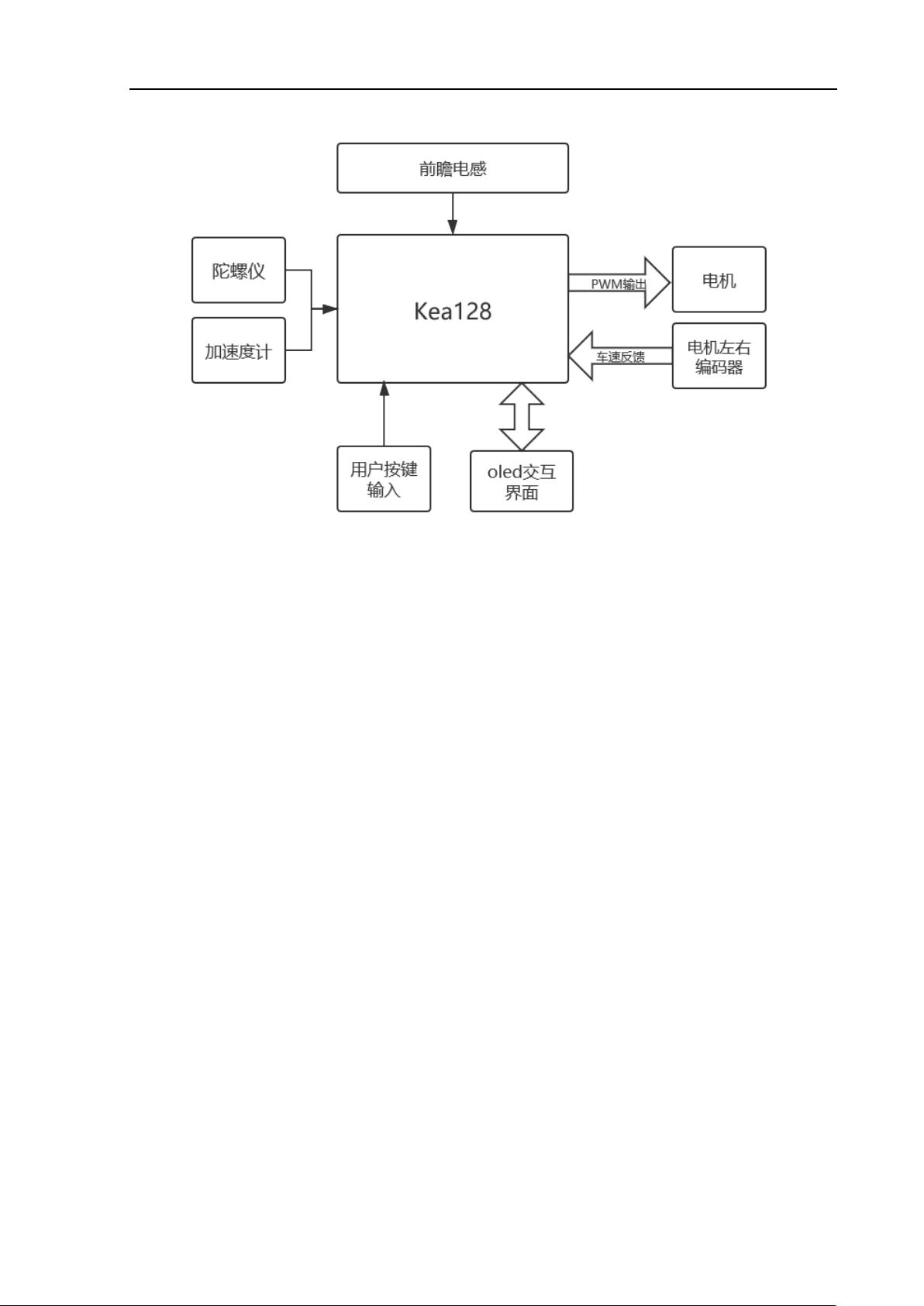
KEA128是一款高性能的微控制器,它在平衡车控制系统中扮演着核心角色。设计中所选用的主要外设包括MMA7361CL加速度计,用于感知车辆的垂直加速度和倾斜角度,提供姿态信息;ENC-3MB+LPR550陀螺仪则帮助测量车辆的角速度和方向,增强系统的稳定性。10mH电磁线圈用于检测环境磁场的变化,这对于磁场导向和路径跟踪至关重要。此外,欧姆龙两相编码器被用来监测车辆的速度,以便于精确控制电机,实现闭环控制。
软件设计的关键部分包括直立平衡控制,采用清华大学的滤波技术结合加速度计和陀螺仪数据,实时估计车辆的姿态,确保车辆保持稳定。在速度调节和自动巡线控制方面,采用了PID(比例积分微分)控制算法,这是一种经典的控制策略,能够有效地调整电机的输出,优化车辆的动力响应和动态性能。
本文的重点在于如何将这些硬件组件与KEA128的计算能力相结合,设计出一套高效、稳定的软件架构,以实现两轮平衡车的智能控制,包括精确的路径跟踪、平稳的行驶以及灵活的转向。这种软件设计不仅提升了车辆的操控性和安全性,还降低了能耗,体现了可持续发展的理念。
该文档深入研究了两轮平衡车软件系统的核心技术,包括传感器融合、控制算法选择和微控制器集成,对于从事两轮平衡车研发、制造以及相关软件开发的工程师来说,具有很高的参考价值。通过阅读和理解这份设计文档,读者可以了解到如何构建一个高性能的两轮自平衡车系统,从而推动这一新兴领域的技术进步。

北京理工大学珠海学院 2020 届本科生毕业设计
运动中通过倾角检测模块实时检测车体倾斜角,并将车体倾斜角数据交由控制器处理,
控制器由此通过控制算法输出一个合适的电机转矩信号,将这个转矩信号输入给电机,
可以使电机产生一定的转矩,从而控制两个车轮实现前进,转弯和后退等功能。至今,
许多平衡车还沿用着 Segway HT 的许多设计。
在 Segway HT 面世后,国内两轮平衡车的研究也十分热门,很多科研机构也早在
2003 年就开始投入到了两轮平衡车的研究当中,并取得了一定的研究成果。2003 年,
一款名为“Free Mover”的二轮自平衡电动车由中国科学技术大学研制出来,而 Free
Mover 在结构上也是由一个连接在车身的连杆和两个车轮组成,车体的前进转弯等操作
可以由驾驶者通过改变重心来控制。而在此之后,哈尔滨工程大学,西安电子科技大学,
清华大学等多所国内高校也相继开始两轮平衡车的研究,其中,清华大学的宋宇宁等研
发的 Cheway 在结构上虽然与 Segway HT 类似,但是 Cheway 能在下坡时将能量进行转化,
为电池充电,使得 Cheway 续航能力得到了提高,同时,Cheway 的成本也远远低于 Segway
HT。
目前已经有许多商用的两轮平衡代步车已经进入了市场,成为人们解决日常通勤最
后一公里的代步工具。两轮平衡车不管在工业用途还是在商用方面都有着宽阔的应用前
景和市场。
1.3 本设计应解决的主要问题
目前,影响两轮平衡车性能的因素主要有三个:
a、 针对两轮自平衡小车,用牛顿经典力学的分析方法进行了建立数学模型;车
身的机械零点,重心以及电磁感应前瞻的长度以及安装位置都在小车平衡控制中尤为
重要,因此需要根据实际情况设计机械机构,并在此基础上建立数学模型。
b、 两轮平衡车的自平衡控制是需要通过加速度计,陀螺仪等传感器实时检测车
身姿态以及运动状态,因此稳定且精准的检测车身倾角是实现稳定控制的关键。
c、 对已经建立的两轮平衡车系统模型进行分析,采用自动控制原理中高阶系统
的动态性能分析法设计 PID 闭环控制器,以达到对系统的动态控制。
d、 两轮自平衡系统本身属于不稳定系统,因此控制这种自平衡要用上动态控制。
在动态控制中 PID 控制应用十分广泛,有着极强的稳定性和动态特性,适用于两轮平
衡车系统的控制要求。系统中用到的 PID 控制器的参数调试整定,以使系统具有优秀
的稳定性和动态特性。
e、 用由 10mh 工字型电感组成的电磁感应线圈,感应周围电磁场以此确定道路的
走向和两轮车相对于道路的位置。
1.4 总设计方案
剩余30页未读,继续阅读
1246 浏览量
346 浏览量
367 浏览量
2021-09-29 上传
2022-07-09 上传
2024-12-11 上传
2022-06-19 上传

南抖北快东卫
- 粉丝: 86
 我的内容管理
展开
我的内容管理
展开







最新资源
- ITween插件实用教程:路径运动与应用案例
- React三纤维动态渐变背景应用程序开发指南
- 使用Office组件实现WinForm下Word文档合并功能
- RS232串口驱动:Z-TEK转接头兼容性验证
- 昆仑通态MCGS西门子CP443-1以太网驱动详解
- 同步流密码实验研究报告与实现分析
- Android高级应用开发教程与实践案例解析
- 深入解读ISO-26262汽车电子功能安全国标版
- Udemy Rails课程实践:开发财务跟踪器应用
- BIG-IP LTM配置详解及虚拟服务器管理手册
- BB FlashBack Pro 2.7.6软件深度体验分享
- Java版Google Map Api调用样例程序演示
- 探索设计工具与材料弹性特性:模量与泊松比
- JAGS-PHP:一款PHP实现的Gemini协议服务器
- 自定义线性布局WidgetDemo简易教程
- 奥迪A5双门轿跑SolidWorks模型下载
