机器人驱动与控制系统解析
版权申诉
131 浏览量
更新于2024-07-02
收藏 6.33MB PPT 举报
"该文档详细介绍了机器人的驱动系统及其组成结构,包括机械部分、传感部分、控制部分,涉及驱动系统、机械结构系统、感受系统、机器人-环境交互系统、人机交互系统、控制系统等六个子系统。此外,还提到了关节、连杆、自由度、刚度等关键术语和性能指标,如定位精度和重复性。"
**第二章 机器人的组成结构**
机器人主要由机械部分、传感部分和控制部分构成,这些部分又细分为多个子系统,以确保机器人能完成复杂的动作和功能。
1. **驱动系统**:
驱动系统是机器人的核心,它负责提供动力,使各个关节能够运动。每个运动自由度都需要相应的传动装置,这些装置可以是电动马达、液压或气压驱动,甚至可能包括伺服电机或其他先进的驱动技术。
2. **机械结构系统**:
机械结构系统由连杆和关节组成,它们允许机器人手臂的不同部分相对移动,形成多自由度的运动能力。连杆是被两个相邻关节分隔的部分,而关节则是允许相对运动的机构。
3. **感受系统**:
感受系统通过内部和外部传感器收集信息,帮助机器人理解和适应其环境。内部传感器监测机器人的内部状态,如关节位置和速度,而外部传感器则用于探测周围环境,如视觉、听觉或触觉传感器。智能传感器的发展极大地提升了机器人的感知能力和智能水平。
4. **机器人-环境交互系统**:
这个系统使得机器人能够与外部设备进行互动,比如在加工、焊接或装配等任务中与工件、工具或其他机械设备协同工作。
5. **人机交互系统**:
人机交互系统提供了一种方式,让操作员可以通过指令给定装置控制机器人,并通过信息显示装置接收机器人的状态反馈。这通常包括控制面板、触摸屏、操纵杆或语音识别系统。
6. **控制系统**:
控制系统根据预设的作业指令和传感器反馈,指挥执行机构完成指定的运动和任务。控制系统有多种类型,如开环、闭环、程序控制、适应性控制以及人工智能控制,分别对应不同的控制策略和精度需求。
**相关术语及性能指标**
- **关节(Joint)**:允许机器人部件之间发生相对运动的机构。
- **连杆(Link)**:被两个关节分隔的机器人手臂部分。
- **自由度(Degree of Freedom, DOF)**:描述机器人运动所需的独立坐标数量,决定了机器人的灵活性。
- **刚度(Stiffness)**:机器人机身对外力变形的抵抗力,衡量其稳定性。
- **定位精度(Positioning Accuracy)**:机器人末端执行器达到目标位置的精确度,即实际位置与理想位置的偏差。
- **重复性(Repeatability)**:机器人在相同指令下重复动作时的位置一致性,衡量动作的稳定性和可重复性。
- **工作空间(Working Space)**:机器人能够到达的所有三维空间区域,受到机械臂长度和结构限制。
这个文档全面解析了机器人的驱动系统及其相关组件,对理解机器人的运动控制和智能感知机制提供了宝贵的参考资料。

2.2工业机器人的机械结构
工业机器人的机械本体类似于具备上肢机能的机械
手 ,由手部、腕部、臂、机身(有的包括行走机构
)组成。
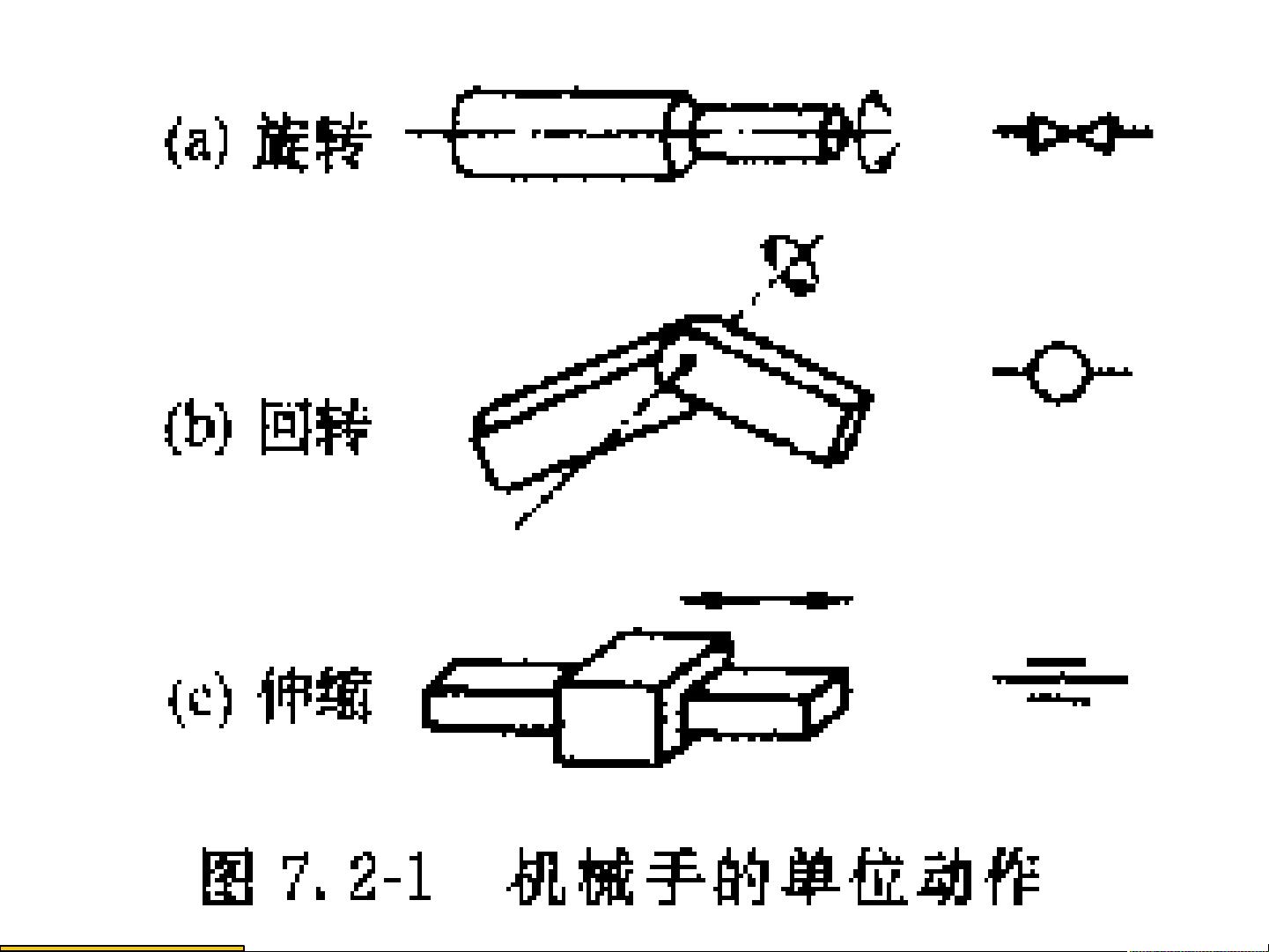
2.2.1机械手的操作动作
• 机械手的动作形态是由三种不同的单动作——旋
转、回转、伸缩组合而成的。
• 旋转和回转是指运动机构产生相对运动。旋转是
转动部件的轴线和转动轴同轴;回转是转动部件
的轴线与转动轴不同轴。
• 伸缩是指运动机构产生直线运动。
剩余51页未读,继续阅读
2022-06-30 上传
2022-04-14 上传
2023-07-05 上传
2023-03-31 上传
2023-10-11 上传
2023-05-16 上传
2023-07-31 上传
2023-08-01 上传
2023-06-09 上传

是空空呀
- 粉丝: 189
- 资源: 3万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
