L3与L4自动驾驶:3D激光雷达的关键角色
版权申诉
155 浏览量
更新于2024-08-03
收藏 969KB PDF 举报
百度智能驾驶传感器发展趋势集中在激光雷达、毫米波雷达以及摄像头等领域,针对不同级别的自动驾驶(L3和L4)提出了关键的技术需求和挑战。
在自动驾驶中,传感器扮演着至关重要的角色,它们是车辆获取环境信息的主要途径。其中,激光雷达(LiDAR)被视为准确识别行人的关键技术。L3级自动驾驶主要应用于封闭高速路,行人出现的频率较低,因此可以采用成本较高的3D激光雷达,但这种方案在面对行人识别的高要求时存在局限性。相反,L4级自动驾驶则需要在全路况下运行,对行人的识别准确性要求更高,因此对3D激光雷达的依赖更大。
当前,3D激光雷达面临的主要问题在于成本和可靠性。机械旋转式的激光雷达成本高昂,而固态式虽有成本优势但技术尚未成熟,无法满足大规模商业应用的需求。毫米波雷达虽然在某些场景下可以辅助识别,但对紧靠环境物体的行人识别能力有限。摄像头虽然在行人识别上有一定进展,但在复杂的L4场景下,其性能仍远不足以应对安全要求。
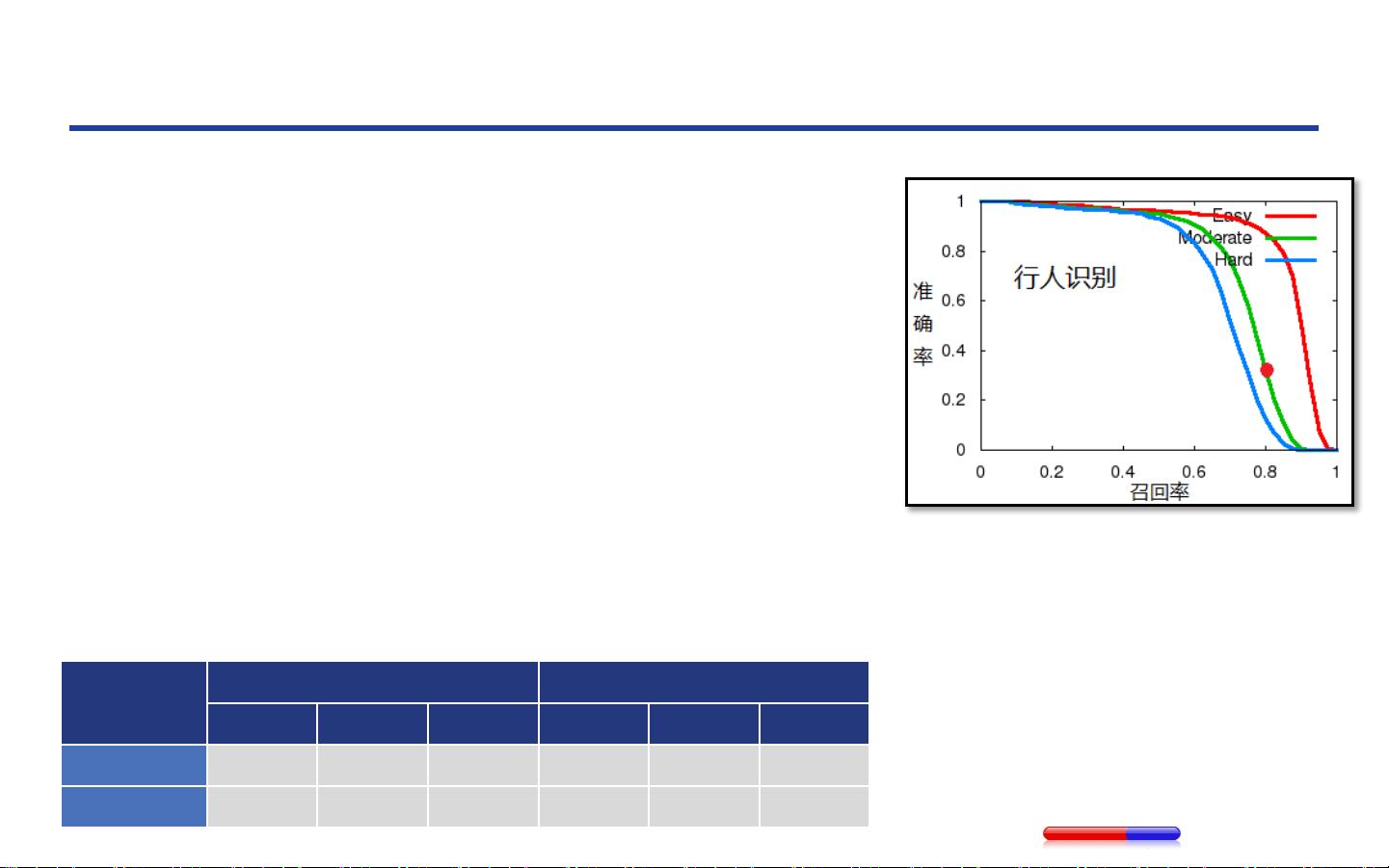
摄像头的行人识别准确率大约在召回率为80%时,准确率只有35%,这意味着在密集行人环境中存在显著的安全隐患。相比之下,3D激光雷达在行人检测上的表现更为优秀,但其高昂的成本使得L3方案难以承受,而L4方案的商业化时间线更长,有可能等到激光雷达技术突破带来的成本下降。
此外,L3和L4自动驾驶方案的开发不能互相替代或渐进升级。L3方案因为缺少3D激光雷达,升级到L4时将面临数据壁垒,需要从零开始收集新的数据以训练AI。这意味着L3和L4必须并行开发,各自积累独有的实际道路行驶数据。
激光雷达技术的发展趋势正朝着固态化、小型化和低成本化方向迈进,如MEMS(微电子机械系统)透镜式固态激光雷达通过微透镜调整激光发射方向,以实现全景扫描,是降低成本和提高可靠性的潜在解决方案。3D激光雷达的技术进步将是推动自动驾驶领域发展的重要驱动力,而如何平衡性能与成本将是业界需要持续攻克的关键课题。
3 / 战略规划管理部
是否依赖3D激光雷达是L3和L4方案的根本性区别
图:目前,使用摄像头识别行人,业界领先
的水平约为召回率80%时达到约35%准确率。
这一水平意味着,当道路上出现100个行人
时,其中会有20个人检测不出来(潜在安全
风险),且同时将误报行人约128次(可能
会导致错误减速或刹车)。这样的识别性能
离满足L4自动驾驶需求差距很大,似可下结
论,摄像头无法应以行人识别为主要挑战的
L4复杂场景。
表:在交通数据测试集KITTI(基于摄像头)上,行人和自行车识别结果远低于汽车
*表、图数据来源:KITTI (截至2016年7月)
3D激光雷达是准确识别行人的唯一有效手段
• 摄像头识别行人准确率很低,无法提升至可用水平
• 毫米波雷达无法识别紧靠环境物体(护栏、车辆等)的行人
3D激光雷达短期内无法解决成本和可靠性问题
• 对于功能有限、需要快速商用的L3方案,目前3D激光雷达的成本太高
• L4方案商用较晚,可等待未来激光雷达技术突破后的成本急降
L3和L4的主要场景差别体现在行人出现的频率
• L3:封闭高速路,很少出现行人,可依靠谨慎的行车策略换取安全
• L4:全路况,行人频繁出现,必须在感知层面对其准确识别
L3方案无法渐进升级至L4,两者须并行开发、同时存在
• 自动驾驶方案最核心的资源是其进入路测乃至商用阶段后的实际道路行
车数据,这是训练、提升人工智能性能的基础。对于不装配3D激光雷达
的L3方案,升级至L4时会遭遇数据壁垒,必须重头开发
(用L3方案来演进到L4)从根本上就错了,这就像是在说“如果我
每天都努力练习跳高,总有一天我会飞”
——Chris Urmson,谷歌自动驾驶技术总监
物体检测准确率 物体检测+方向估计准确率
汽车 自行车 行人 汽车 自行车 行人
近距无遮挡 96.41% 82.39% 83.63% 91.44% 72.00% 78.45%
远距有遮挡 83.76% 65.31% 66.36% 78.68% 56.32% 61.36%
剩余11页未读,继续阅读
2021-06-20 上传
2021-06-21 上传
2021-01-05 上传
2024-07-24 上传
2021-09-11 上传
2021-04-24 上传
2022-05-26 上传
2021-05-24 上传
2021-04-24 上传

电气_空空
- 粉丝: 4870
- 资源: 1261
 我的内容管理
展开
我的内容管理
展开







最新资源
- ES管理利器:ES Head工具详解
- Layui前端UI框架压缩包:轻量级的Web界面构建利器
- WPF 字体布局问题解决方法与应用案例
- 响应式网页布局教程:CSS实现全平台适配
- Windows平台Elasticsearch 8.10.2版发布
- ICEY开源小程序:定时显示极限值提醒
- MATLAB条形图绘制指南:从入门到进阶技巧全解析
- WPF实现任务管理器进程分组逻辑教程解析
- C#编程实现显卡硬件信息的获取方法
- 前端世界核心-HTML+CSS+JS团队服务网页模板开发
- 精选SQL面试题大汇总
- Nacos Server 1.2.1在Linux系统的安装包介绍
- 易语言MySQL支持库3.0#0版全新升级与使用指南
- 快乐足球响应式网页模板:前端开发全技能秘籍
- OpenEuler4.19内核发布:国产操作系统的里程碑
- Boyue Zheng的LeetCode Python解答集
