无人机辅助移动边缘计算中的能源感知资源分配
需积分: 10 84 浏览量
更新于2024-07-09
收藏 6.37MB PDF 举报
"这篇文档是关于‘能源意识的动态资源分配在无人机辅助移动边缘计算中的应用’的研究,特别关注于车载社交网络的高级大数据分析。文章由LONGZHANG等人撰写,发表于2018年,并得到了中国国家自然科学基金的支持。"
在现代通信技术中,随着物联网(IoT)和移动边缘计算(MEC)的快速发展,能源效率成为了一个关键的考虑因素。本文主要探讨了在无人机辅助的移动边缘计算中,如何实施能源意识的动态资源分配策略,以优化车载社交网络(VSNs)的大数据分析性能。移动边缘计算将计算能力推到了网络的边缘,即接近数据生成源的地方,这样可以减少延迟,提高能效,并提供实时服务。
文章首先阐述了车载社交网络的背景和重要性,强调了在这些系统中处理大数据的挑战,如数据量大、处理速度要求高以及能源消耗问题。接着,作者提出了一种新的能源感知模型,该模型考虑了无人机的能量消耗、传输距离、计算负载等因素,旨在最大化系统的整体能源效率和性能。
在动态资源分配策略方面,论文可能详细讨论了如何根据实时的网络条件和设备状态,动态调整计算资源、通信资源和无人机的飞行路径。这涉及到优化算法的设计,可能包括了线性规划、动态编程或者机器学习方法,以确保在满足服务质量(QoS)要求的同时,实现能源消耗的最小化。
此外,论文可能还深入研究了大数据分析在VSNs中的应用,例如交通流量预测、驾驶行为分析等,这些都需要高效的数据处理和分析能力。通过在无人机上部署MEC,可以对这些数据进行实时处理,减少回传到云端的需求,从而降低能源消耗。
最后,论文可能会评估所提出的能源意识的动态资源分配策略的性能,通过模拟实验或实际测试,对比传统方法,展示其在提升能源效率、延长无人机续航时间以及改善VSNs服务性能方面的优势。
这篇研究工作为车载社交网络的大数据分析提供了新的视角,通过能源意识的动态资源分配策略,有望实现更加绿色、高效的计算环境,推动未来智能交通和物联网的发展。
L. Zhang et al.: Energy-Aware Dynamic Resource Allocation in UAV-Assisted MEC Over SIoV
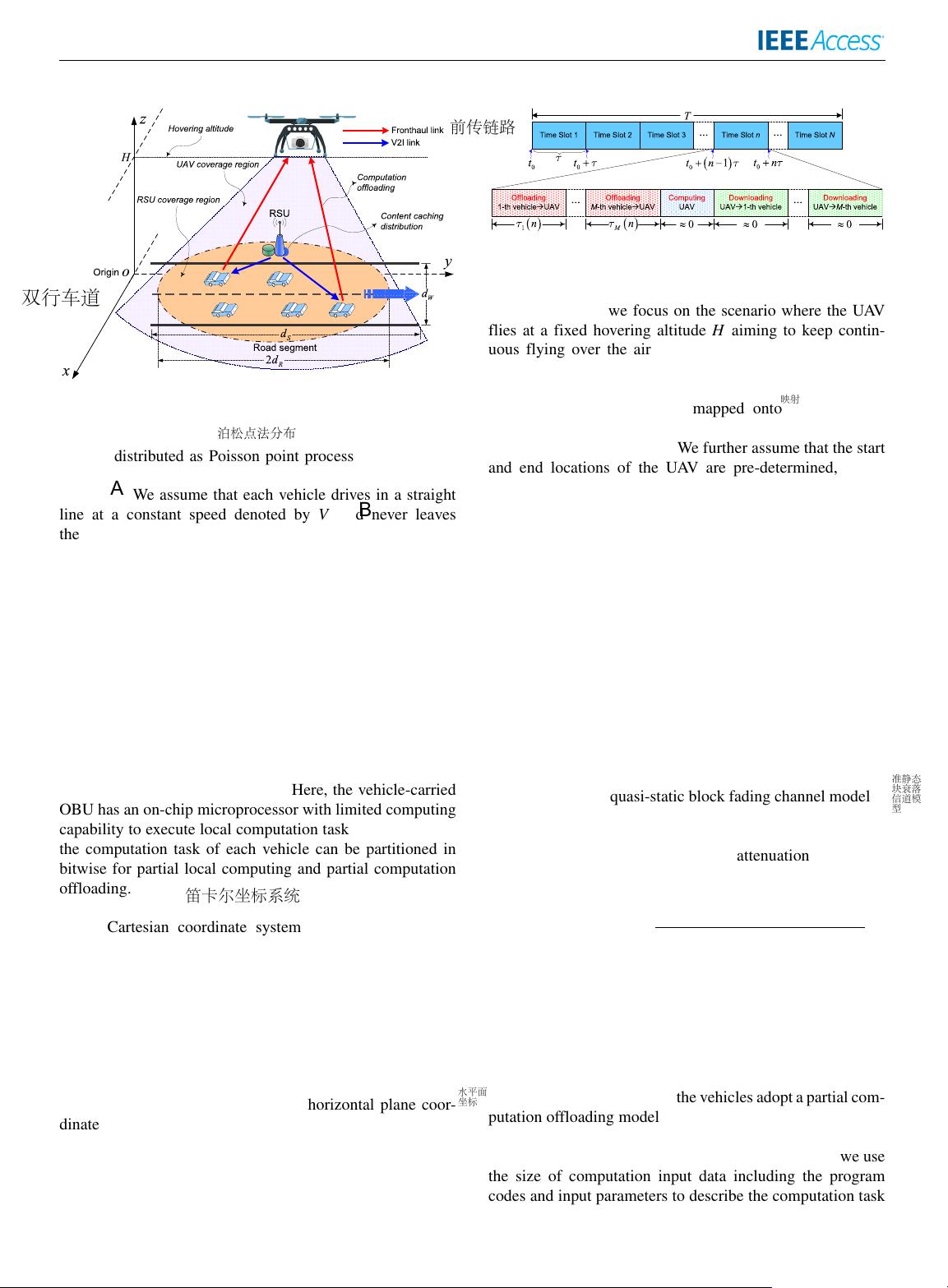
FIGURE 2. The system model.
and are distributed as Poisson point process on the straight
unidirectional multi-lane road segment with length d
S
and
width d
W
. We assume that each vehicle drives in a straight
line at a constant speed denoted by V, and never leaves
the road. The UAV is mounted with a transceiver, a single
antenna, and a MEC server. In particular, the MEC server
connects to the core network through wireless backhaul and
provides computation resources to vehicles by adopting a
powerful computing processor. A RSU is installed along
the road to make drivers and passengers enjoy the socially-
inspired services and require the cached popular social con-
tents via the social content caching server. The cacheable
RSU with a radius d
R
≤ d
S
/2 is stationary after deployment.
We assume that M vehicles are within the coverage region of
the RSU. Thereby, M vehicles can request the cached social
contents from the RSU via V2I link. Each vehicle is equipped
with a single-antenna OBU which can communicate with the
UAV, the RSU and other vehicles. Here, the vehicle-carried
OBU has an on-chip microprocessor with limited computing
capability to execute local computation task. In this context,
the computation task of each vehicle can be partitioned in
bitwise for partial local computing and partial computation
offloading.
Without loss of generality, we consider a three dimen-
sional Cartesian coordinate system to describe the loca-
tions of the ground vehicles and the flying UAV. As shown
in Fig. 3, the finite time horizon T is divided into N time
slots with equal length τ , i.e., τ = T /N . Let t
n
corre-
spond to the instant time within the nth time slot, for t
n
∈
[
t
0
+
(
n − 1
)
τ, t
0
+ nτ
]
, where t
0
is an initial time of time
horizon T . It is should be noted that there exist continuous
time during each time slot, which differs from fixed time slot
division in a discrete way. At the nth time slot, the instant
location of the mth vehicle over the horizontal plane coor-
dinate can be denoted as q
m
(
t
n
)
=
[
x
m
(
t
n
)
, y
m
(
t
n
)
]
. Under
such circumstances, the mobility constraint of the mth vehicle
is determined as
k
q
m
(
T
)
− q
m
(
0
)
k
= VT ≤ 2d
R
, ∀m (1)
FIGURE 3. The time slot allocation for computation offloading from
M vehicles to UAV by using a TDMA-based co-channel media access.
In this system, we focus on the scenario where the UAV
flies at a fixed hovering altitude H aiming to keep contin-
uous flying over the air. This stable hovering of the UAV
contributes to avoidance of frequent aircraft ascending and
descending owing to terrain or building blockage. Then the
instant location of the UAV mapped onto the horizontal
plane coordinate at the nth time slot can be denoted by
q
U
(
t
n
)
=
[
x
U
(
t
n
)
, y
U
(
t
n
)
]
. We further assume that the start
and end locations of the UAV are pre-determined, which
can be also given as q
s
U
= [x
s
U
, y
s
U
] and q
e
U
= [x
e
U
, y
e
U
],
respectively. Technically, τ can be chosen to be sufficiently
small such that the location of the UAV stays approximately
at a fixed location at each time slot [20], [28], [32]. In this
way, by incorporating the locations of N time slots, the flying
trajectory of the UAV within time horizon T can be modeled
by q
U
=
q
s
U
, q
U
(
t
1
)
, ··· , q
U
(
t
N
)
, q
e
U
. Thereby, the tra-
jectory constraints of the UAV can be represented as
k
q
U
(
t
n
)
− q
U
(
t
n−1
)
k
≤ τ V
max
U
, ∀n
q
s
U
= q
U
(
0
)
, ∀n
q
e
U
= q
U
(
T
)
, ∀n (2)
where V
max
U
is the UAV’s maximum flight speed. We assume
that the wireless channel from ground vehicles to the UAV
is dominated by the line-of-sight (LoS) transmission link
[20], [28], [32]. A quasi-static block fading channel model is
utilized to represent the ground-UAV LoS link. In this case,
the channel remains unchanged within each fading block, and
is subject to distance dependent power attenuation. Therefore,
at the nth time slot, the channel gain between the mth vehicle
and the UAV can be formulated as
h
m
(
t
n
)
= η
0
d
−ζ
m
(
t
n
)
=
η
0
k
q
U
(
t
n
)
− q
m
(
t
n
)
k
2
+ H
2
ζ /2
(3)
where η
0
is the channel gain at a reference distance d
0
, d
m
(
t
n
)
is the distance between the mth vehicle and the UAV over the
horizontal plane, and ζ ≥ 2 is the path-loss exponent.
A. COMPUTATION MODEL
In this paper, we assume that the vehicles adopt a partial com-
putation offloading model. That is, the computation task can
either be executed locally at the vehicles, or be offloaded to
and executed by the UAV assisted MEC server. Here, we use
the size of computation input data including the program
codes and input parameters to describe the computation task
VOLUME 6, 2018 56703
泊松点法分布
双行车道
A
B
笛卡尔坐标系统
水平面
坐标
映射
准静态
块衰落
信道模
型
衰减
前传链路
剩余15页未读,继续阅读
2021-02-07 上传
2021-02-11 上传
2021-02-06 上传
2021-02-09 上传
2023-09-02 上传
2019-08-16 上传
2021-02-21 上传
2021-02-07 上传
2023-09-05 上传

MC数据局
- 粉丝: 3w+
- 资源: 38
 我的内容管理
展开
我的内容管理
展开







最新资源
- 新型智能电加热器:触摸感应与自动温控技术
- 社区物流信息管理系统的毕业设计实现
- VB门诊管理系统设计与实现(附论文与源代码)
- 剪叉式高空作业平台稳定性研究与创新设计
- DAMA CDGA考试必备:真题模拟及章节重点解析
- TaskExplorer:全新升级的系统监控与任务管理工具
- 新型碎纸机进纸间隙调整技术解析
- 有腿移动机器人动作教学与技术存储介质的研究
- 基于遗传算法优化的RBF神经网络分析工具
- Visual Basic入门教程完整版PDF下载
- 海洋岸滩保洁与垃圾清运服务招标文件公示
- 触摸屏测量仪器与粘度测定方法
- PSO多目标优化问题求解代码详解
- 有机硅组合物及差异剥离纸或膜技术分析
- Win10快速关机技巧:去除关机阻止功能
- 创新打印机设计:速释打印头与压纸辊安装拆卸便捷性
