六轴串联机器人轨迹规划:径向基函数方法研究
版权申诉
198 浏览量
更新于2024-06-19
1
收藏 2.32MB PDF 举报
"该资源是一篇关于基于径向基函数的六轴串联机器人轨迹规划研究的毕业论文,主要探讨了KUKA RC900型六轴串联机器人的运动学建模、关节空间轨迹规划以及时间最优轨迹规划方法。论文通过MATLAB仿真验证了所提方法的性能,并设计了基于VS软件的开放式轨迹规划平台进行实际应用验证。"
在工业机器人技术日益发展的背景下,本文深入研究了六轴串联机器人的运动学与轨迹规划问题。首先,介绍了KUKA RC900型机器人的运动学基础,利用改进的Denavit-Hartenberg(D-H)参数法构建了机器人的数学模型。通过算法实现了正向和逆向运动学的求解,并在MATLAB环境下进行了仿真,以证明运动学模型的准确性。
接着,论文聚焦于关节空间的轨迹规划。对比分析了三次、五次多项式算法与改进的三次B样条算法。改进的三次B样条算法在仿真中表现出更平滑的关节速度轨迹,加速度曲线连续无跳跃,能精确通过预设的节点,从而提升了轨迹的精度。
最后,论文提出了基于径向基函数插值法的时间最优轨迹规划策略。这种方法优化了时间目标函数,与五次多项式插值法和改进的三次B样条插值法相比,它能生成平滑轨迹的同时减少运行时间,显著提高了轨迹规划效率。通过参考KUKA RC900的机械参数,构建了一个基于VS软件的轨迹规划平台,验证了径向基函数插值法的有效性,确保了各关节轨迹运行的稳定性。
这篇论文的研究成果对于工业机器人的轨迹规划领域具有重要的理论与实践意义,径向基函数插值技术在提高轨迹精度和运行效率方面的优势得到了充分展示。关键词包括六轴串联机器人、运动学分析、径向基函数、轨迹规划和仿真。
天津理工大学硕士学位论文 第二章 六轴串联机器人的基本运动学分析
-
7
-
第二章 六轴串联机器人的基本运动学分析
机器人的运动学就是对笛卡尔和关节空间中机器人的位置,速度等特性进行
分析,而不考虑引起运动的力和力矩。本章将主要从机器人运动学建模、正逆运
动学求解等方面来介绍 KUKA RC900 型六轴串联机器人的基本运动学。
2.1
运动学的数学理论基础
机器人的操作是通过工业机器人的末端操作器在工作区中移动零件和工具,
为了能够清楚地定义和表达机器人的位置和姿态,本节将根据具体的数据分别对
零件、工具和机器人本体进行坐标系的定义和表达。
2.1.1
机器人位姿的描述
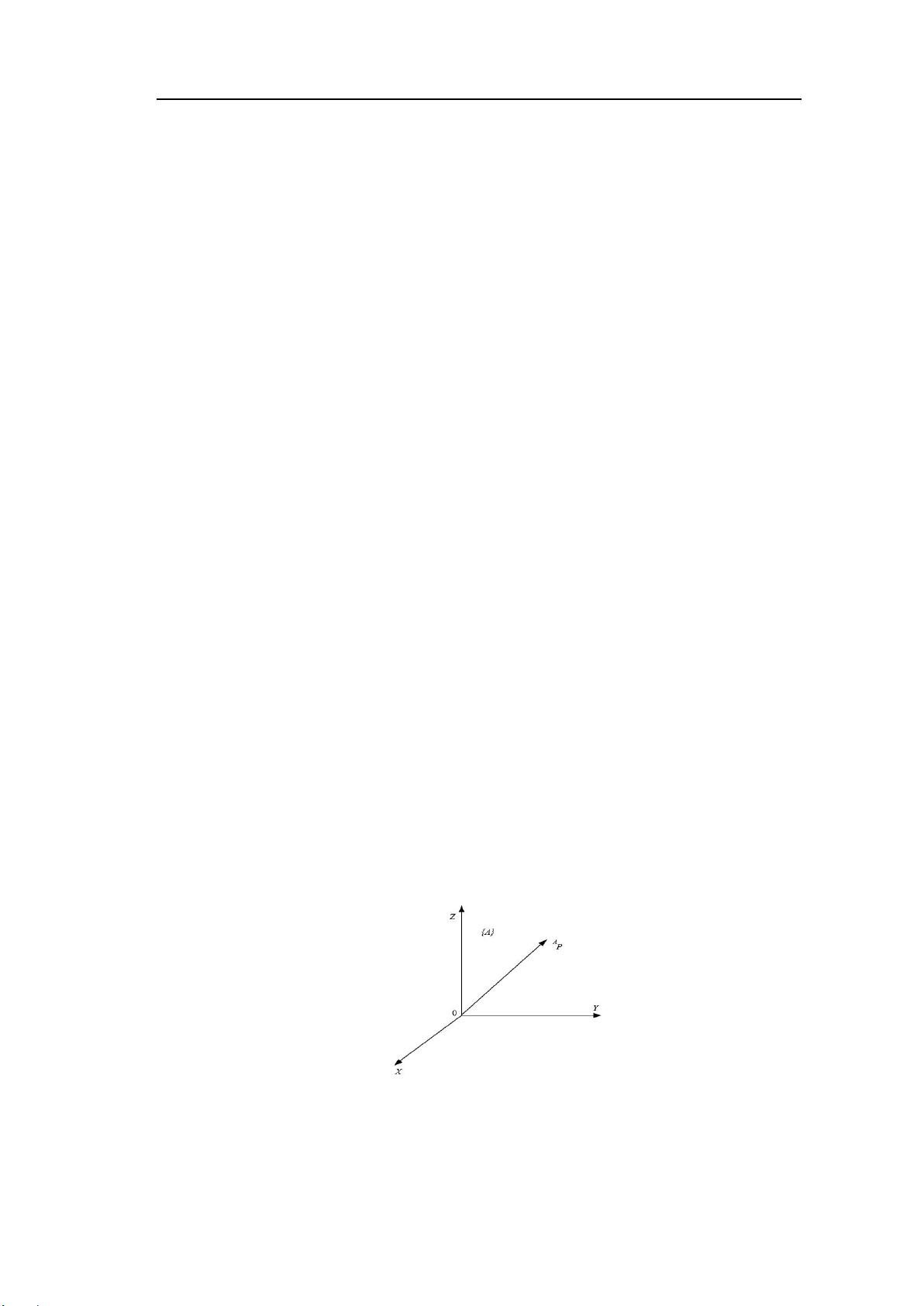
在世界坐标系中,任意一点
P
的位置都可以用
13
的位置矢量来表达。如公
式(
2.1
)所示,笛卡尔坐标系
A
中有三个相互正交的矢量。
z
y
x
A
p
p
p
P
(2.1)
x
p
、
y
p
、
z
p
分别为
P
在笛卡尔坐标系上
x
,
y
,
z
的分量。
P
A
的左上标
A
代
表参考系
A
。
图
2.1
任意一点
P
在三维空间的位置表示
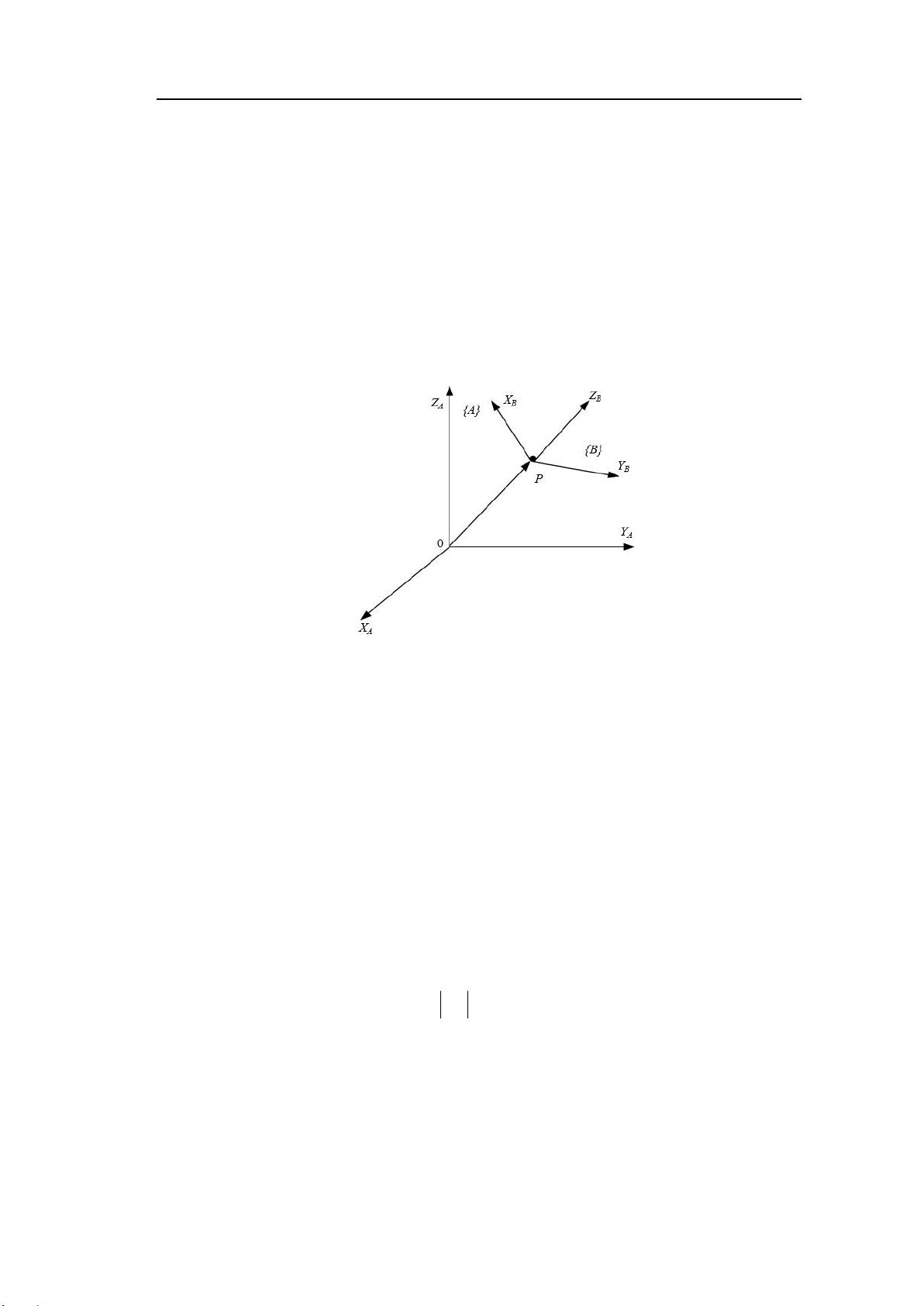
要想操作六轴串联机器人,光知道位置是还不够的,还要知道物体的姿态。

剩余68页未读,继续阅读
2021-08-13 上传
2021-11-26 上传
2021-08-12 上传
2023-07-15 上传
2023-07-29 上传
2024-01-23 上传
2023-08-19 上传
2023-12-20 上传
2023-09-14 上传


icwx_7550592
- 粉丝: 20
- 资源: 7163
 我的内容管理
展开
我的内容管理
展开







最新资源
- Elasticsearch核心改进:实现Translog与索引线程分离
- 分享个人Vim与Git配置文件管理经验
- 文本动画新体验:textillate插件功能介绍
- Python图像处理库Pillow 2.5.2版本发布
- DeepClassifier:简化文本分类任务的深度学习库
- Java领域恩舒技术深度解析
- 渲染jquery-mentions的markdown-it-jquery-mention插件
- CompbuildREDUX:探索Minecraft的现实主义纹理包
- Nest框架的入门教程与部署指南
- Slack黑暗主题脚本教程:简易安装指南
- JavaScript开发进阶:探索develop-it-master项目
- SafeStbImageSharp:提升安全性与代码重构的图像处理库
- Python图像处理库Pillow 2.5.0版本发布
- mytest仓库功能测试与HTML实践
- MATLAB与Python对比分析——cw-09-jareod源代码探究
- KeyGenerator工具:自动化部署节点密钥生成
