FPGA驱动的仿人机器人面部表情控制系统设计
156 浏览量
更新于2024-09-01
收藏 418KB PDF 举报
"基于FPGA的仿人机器人面部驱动系统,旨在解决单片机处理多任务时的延时问题,利用FPGA的并行处理能力,提高面部表情控制的准确性和速度。该系统应用于MSR2型仿人机器人,包含21个动作单元,分布在眉毛、眼球、眼睑、嘴巴和下颌。驱动系统由电机控制、反馈信号采集和上位机通信三部分组成,使用Altera公司的CycloneII系列FPGA器件作为核心控制器。电机驱动模块设计中,采用了微型舵机H301,并通过FPGA输出21路PWM信号进行精准控制。"
文章深入探讨了基于FPGA的仿人机器人面部驱动系统的设计与实现。传统的单片机由于顺序执行指令,难以应对复杂的多任务需求,尤其是在仿人机器人的面部表情控制中,需要高精度和快速响应。FPGA的并行处理特性成为了解决这一问题的关键,它可以在同一时间内处理多个任务,从而提高了驱动系统的性能。
系统硬件结构包括电机控制模块,负责驱动21个面部动作单元;反馈信号采集模块,用于收集传感器数据,确保表情的准确再现;以及与上位机通信模块,接收上层PC机发送的面部单元运动指令。其中,选择的FPGA型号是Altera公司的EP2C5Q208C8,属于CycloneII系列,具备足够的逻辑资源来实例化各个功能模块。
电机驱动模块设计中,使用微型舵机H301,因其体积小、速度快的特点,适合在仿人机器人头部狭窄的空间内工作。舵机通过接收FPGA产生的PWM脉冲来控制旋转角度,而PWM模块的设计可以通过Verilog HDL代码实现,如SteeringGear实例SG1,接收50MHz的时钟输入和复位信号,生成对应的PWM脉冲。
通过这样的设计,基于FPGA的驱动系统不仅简化了硬件结构,还显著提升了面部表情的控制效率和精确度,为仿人机器人的情感表达提供了强有力的技术支持。此系统对于未来仿人机器人技术的发展,尤其是在情感交流和交互方面,具有重要的理论与实践意义。
基于基于FPGA的仿人机器人面部驱动系统的仿人机器人面部驱动系统
针对单片机在处理多任务事件时的延时问题,提出了基于现场可编程门阵列(FPGA)的驱动系统设计方案。根据
FPGA的多任务可并行处理特点,分别进行设计和验证并通过在一片FPGA上统一实例化模块,简化了驱动系统
的硬件结构。实验表明,基于FPGA的驱动系统可有效提高面部表情控制准确度和表情再现速率。
为了能够充分表达人类的情感,仿人机器人通过多个运动机构牵动仿真人面皮实现人类表情[1-3]。这种面部机构具有自由度众
多、运动复杂、控制精度要求高等特点。实践表明,由于指令顺序执行,单个单片机很难完成多任务系统的设计。然而,采用
多个单片机分布控制的方式,虽然能够满足设计需求,但系统稳定性较差,设计成本增加。
本文选用非定制逻辑器件FPGA作为控制芯片来完成整个驱动系统的设计。区别于单片机,FPGA并行的设计理念可使系统模
块独立运行,在简化系统架构的同时,提高执行机构的协同性。
1 面部运动分析与系统硬件结构面部运动分析与系统硬件结构
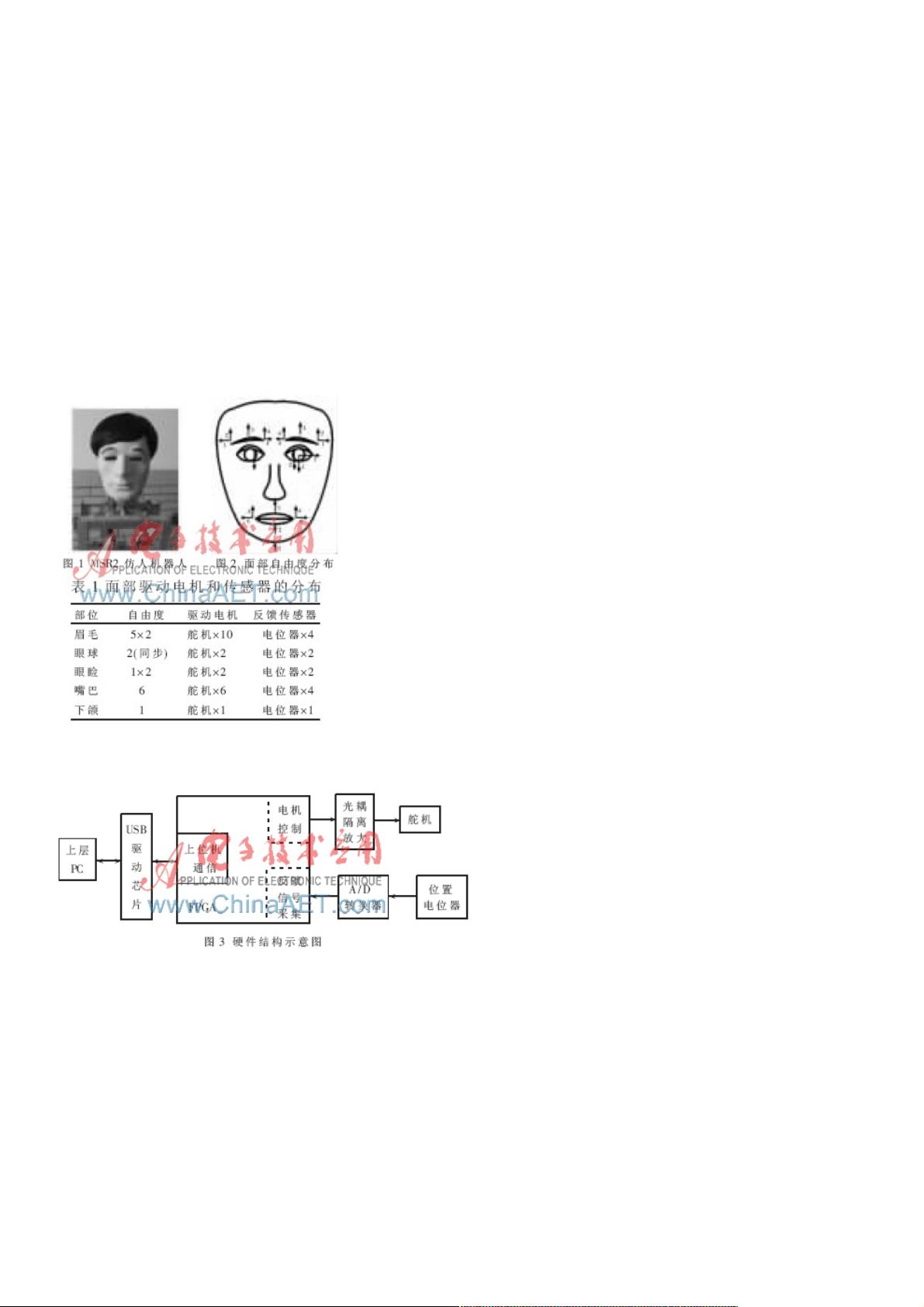
本系统用于驱动西南科技大学自主研发的MSR2型仿人机器人面部产生人类表情,如图1所示。其面部具有21个基本动作单元
AU(Action Unit),主要集中分布于眉毛、眼球、眼睑、嘴巴和下颌等5个部位,如图2所示。表1给出了5个部位的驱动电机和传感
器分布情况。
面部驱动系统是仿人机器人控制系统的一个组成部分,面部单元运动指令由上层PC机完成。因此,本文将面部驱动系统划分
成电机控制、反馈信号采集和上位机通信三个部分,图3所示为硬件结构示意图。
2 FPGA模块化设计模块化设计
本设计选择Altera公司Cyclone II系列FPGA器件EP2C5Q208C8,作为驱动系统核心控制芯片。
2.1 电机驱动模块设计电机驱动模块设计
仿人机器人头部空间狭小,选用的微型舵机型号为H301,其旋转角速度为500°/s。H301的控制仅需一路周期为20 ms的PWM
脉冲, 有效正脉宽范围为0.5 ms~2.5 ms,对应舵机旋转角度范围为0°~180°。PWM脉宽与H301转角呈线性对应关系。驱动系
统需要实现对21路舵机的控制,即需要FPGA输出21路PWM[4]。PWM的输出可以作为一个模块来设计,以下是舵机模块
SteeringGear实例SG1的Verilog HDL代码:
SteeringGear SG1(.clk(clk) //50 MHz时钟输入
.rst_n(rst_n) //复位信号,低电平有效
.pwm_out_en(pwm_EN) //PWM输出使能
下载后可阅读完整内容,剩余4页未读,立即下载
2020-08-29 上传
2021-07-13 上传
点击了解资源详情
2021-07-13 上传
2021-07-13 上传
2021-08-11 上传
2021-07-13 上传
2009-12-25 上传
2020-10-26 上传

weixin_38538585
- 粉丝: 3
- 资源: 956
 我的内容管理
展开
我的内容管理
展开







最新资源
- Angular实现MarcHayek简历展示应用教程
- Crossbow Spot最新更新 - 获取Chrome扩展新闻
- 量子管道网络优化与Python实现
- Debian系统中APT缓存维护工具的使用方法与实践
- Python模块AccessControl的Windows64位安装文件介绍
- 掌握最新*** Fisher资讯,使用Google Chrome扩展
- Ember应用程序开发流程与环境配置指南
- EZPCOpenSDK_v5.1.2_build***版本更新详情
- Postcode-Finder:利用JavaScript和Google Geocode API实现
- AWS商业交易监控器:航线行为分析与营销策略制定
- AccessControl-4.0b6压缩包详细使用教程
- Python编程实践与技巧汇总
- 使用Sikuli和Python打造颜色求解器项目
- .Net基础视频教程:掌握GDI绘图技术
- 深入理解数据结构与JavaScript实践项目
- 双子座在线裁判系统:提高编程竞赛效率
