操作臂逆运动学解析:从理论到实例
需积分: 37 186 浏览量
更新于2024-07-16
1
收藏 1.56MB PDF 举报
"第4章-操作臂逆运动学.pdf - 工业机器人应用技术 - 机器人学导论"
本文档详细介绍了操作臂逆运动学,这是工业机器人技术中的一个重要概念。逆运动学主要关注的问题是,给定工具坐标系相对于工作台坐标系的期望位置和姿态,如何求解出使得机器人末端执行器达到该位置和姿态的一系列关节角。与前一章(运动学正问题)中探讨的从关节角到工具坐标系位置和姿态的转换相反,逆运动学问题的解决更为复杂。
4.1 概述
在上一章中,我们学习了运动学正问题,即已知各关节角,如何计算工具坐标系的位置和姿态。而在本章中,我们将转向逆运动学,研究如何从期望的工具坐标系状态反推关节角。这是一个关键问题,因为它直接关系到机器人如何规划其运动路径以执行特定任务。
4.2 可解性
逆运动学问题的可解性涉及到关节自由度(n)与机器人结构。对于具有六个或更多自由度的机器人(通常称为六轴机器人),存在多个可能的关节角解,这是因为存在多个不同的姿态可以达到同一目标位置。文档中列出了一系列矩阵表达式,这些表达式可能与解的多样性有关,但具体的解法取决于机器人的具体结构和约束条件。
4.3 到4.7 解法介绍
这部分内容详细阐述了多种逆运动学的解法,包括代数解法、几何解法以及针对特定结构(如三轴相交的PIEPER解法)的简化方法。这些方法分别适用于不同的情况,并且各有优缺点。例如,代数解法可能通过将问题转化为多项式方程组来求解,而几何解法则更直观,但可能在数学处理上更为复杂。
4.8 标准坐标系
标准坐标系的定义对于理解和描述机器人的运动至关重要。它是建立机器人各关节坐标系和工具坐标系之间关系的基础,也是求解逆运动学问题时的参考框架。
这篇文档深入浅出地讲解了操作臂逆运动学的基本理论和解题策略,对理解机器人运动控制有极大的帮助。无论是机器人设计者还是操作者,掌握逆运动学原理都是必不可少的,它能够帮助实现精确的机器人定位和灵活的任务规划。
2019/12/6
6
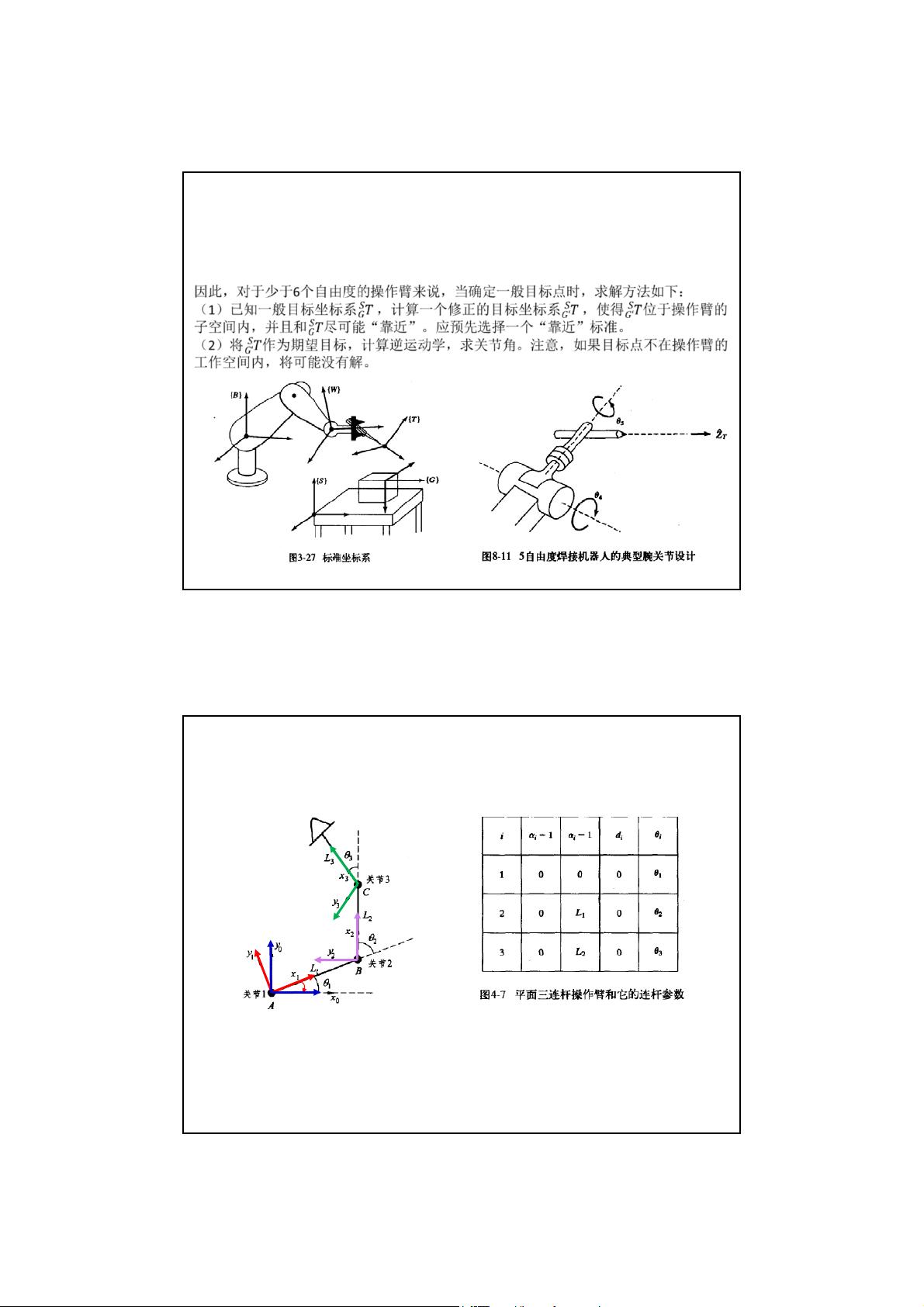
对具有n个自由度操作臂的目标点进行定义,通常采用n个参数来确定这个目标点。
也就是说,如果给定的目标点有6个自由度,一般自由度n
6的操作臂是无法到达这个
目标点的。在这种情况下,可寻找一个位于操作臂子空间内的可达目标点代替目标点,
并且和原期望目标点尽可能“靠近”。
11
4.4 代数解法与几何解法
代数解法:以第三章所介绍三连杆平面操作臂为例,其坐标和连杆参数如下
按第三章的方法,应用这些连杆参数可以求得这个机械臂的运动学方程:
1000
0100
0
0
12211123123
12211123123
0
3
slslcs
clclsc
TT
B
W
12
剩余29页未读,继续阅读
369 浏览量
207 浏览量
1951 浏览量
2021-09-21 上传
137 浏览量
2019-12-31 上传
214 浏览量
2021-09-17 上传
2021-09-17 上传

coder1qiang
- 粉丝: 1
- 资源: 8
 我的内容管理
展开
我的内容管理
展开







最新资源
- C#编程规范(Ver 2.0).doc
- MyEclipse快捷键与插件大全
- 数字图像处理系统的设计与实现 毕业设计
- 深入讲解动态内存分配
- JA312_EN_Col62_FV_240807
- cdonts newmail对象参数说明及发送email实例
- PCI系列总线及其应用.PDF
- 系统分析师考试大纲-2008
- JA310_EN_640_Col54_FV_230306
- 最好的java面试题
- vim用户手册中文版70f
- 2008年9月三级网络真卷
- C#小游戏非常之好玩下了就知道
- Linux内核情景分析.pdf
- A Programmer Introduction to C# (pdf)
- Apress Expert Oracle Database 11g Administration
