Delta Tau ACC-84E附件手册:接线与硬件指南
需积分: 10 192 浏览量
更新于2024-07-16
收藏 4.75MB PDF 举报
"附件84E/ACC-84E是Delta Tau Data Systems公司提供的一款通用串行编码器接口设备的用户手册。该手册详细介绍了SingleSource Machine Control的功能特性,强调了其在功率、灵活性和易用性方面的优势。它位于21314 Lassen Street, Chatsworth, CA 91311,联系电话为(818)998-2095,传真号码为(818)998-7807,同时提供了网址www.deltatau.com供用户查询更多信息。
用户手册的第一页标注了版权信息,指出所有权利归Delta Tau Data Systems, Inc.所有,未经书面许可,不得擅自使用。手册中的内容可能会根据产品改进进行更新,可能与早期版本存在差异,因此如果发现错误或不一致,用户应通过电话(818)717-5656,传真(818)998-7807或电子邮件support@deltatau.com联系技术支持团队,也可以访问网站http://www.deltatau.com获取最新的支持和指导。
ACC-84E用户手册的重点部分涵盖了该产品的功能特性,即Universal Serial Encoder Interface,意味着它能够与多种类型的串行编码器设备无缝连接,实现数据的高效传输和控制。产品型号为3Ax-603927-xUxx,表明这是特定的硬件版本。发布日期为2018年10月17日,手册内容包含了安装、配置、操作和维护等方面的信息,确保用户能够充分利用这款辅助设备提升其运动控制系统的性能。
此外,手册还提醒用户,所有Delta Tau Data Systems的运动控制器、配件和放大器都包含静电敏感元件,所以在处理和安装时必须遵循适当的防静电措施,以防止对设备造成损害。这份用户手册为用户提供了关于ACC-84E全面而专业的技术指南,旨在帮助用户充分利用这款设备,并确保系统稳定和高效运行。"
ACC-84E User Manual
Hardware Setup 16
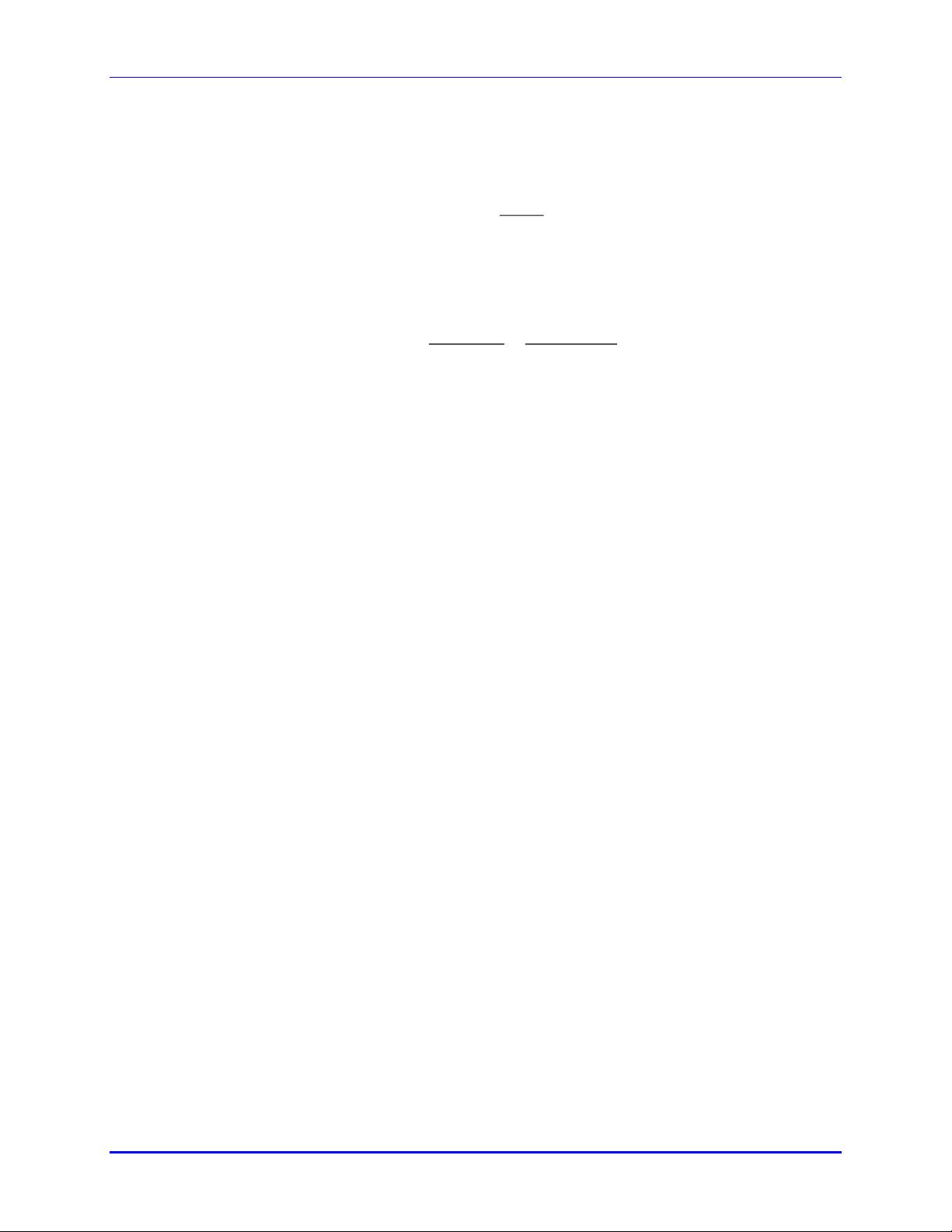
Mitsubishi HG- Servo Motor Encoders
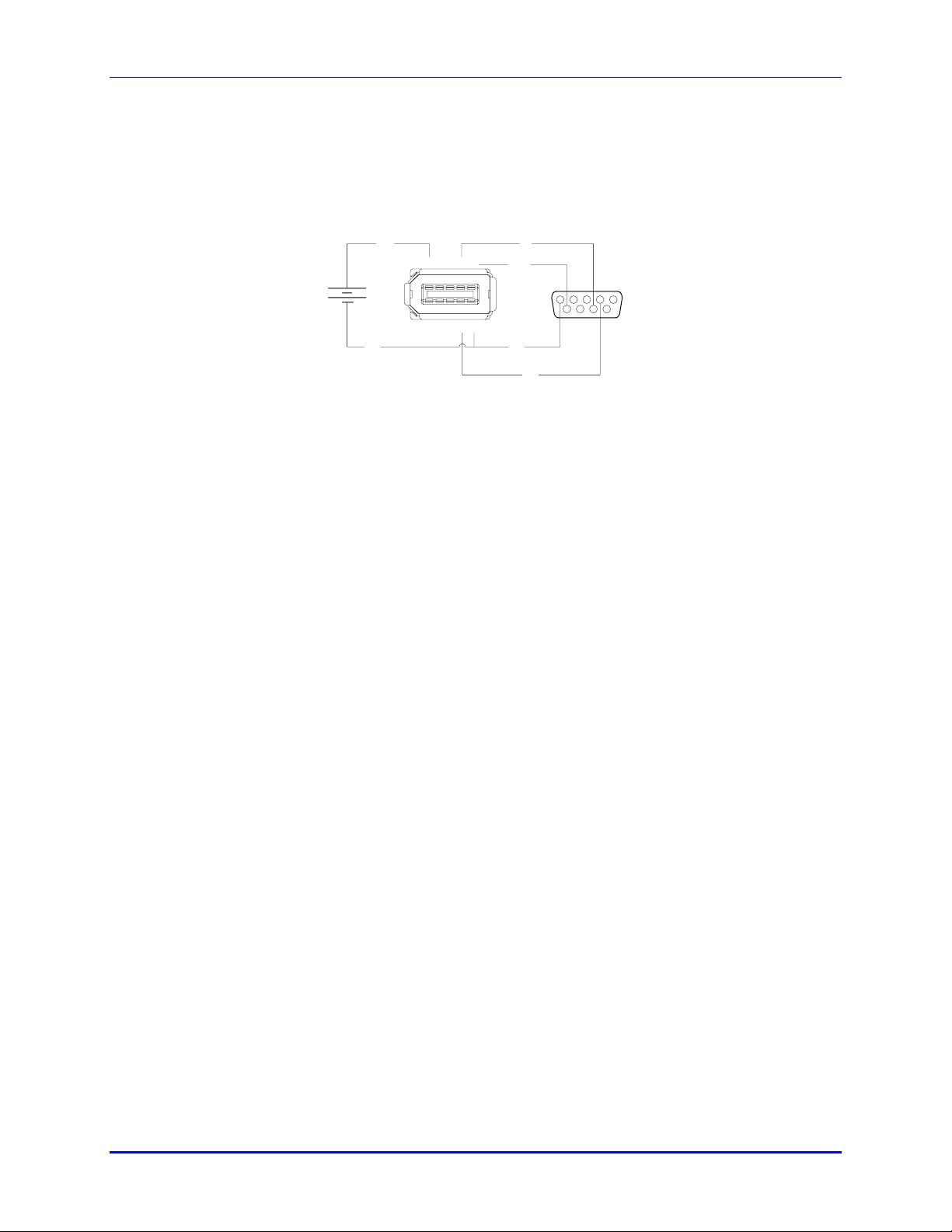
Mitsubishi HG- servo motor absolute encoders require a 3.6V battery to maintain the multi-turn data
while the controller is powered down. This battery should be placed outside of ACC-84E and the
Mitsubishi HG- servo motor’s encoder, possibly on the cable. The battery should be installed between
pin 9 of the motor encoder connector (+6V) and pin 2(GND). Use of ready-made cables by Mitsubishi is
recommended. (Mitsubishi part number: UWR00650)
19 3
24
+5VDC
BAT+
MR
GND
BAT-
MRR
12345
6789
The diagram above shows the pin assignment from mating 3M SCR Receptacle (36110) to ACC-84E
encoder input.
剩余157页未读,继续阅读
2020-06-11 上传
2022-09-15 上传
2023-07-22 上传
2019-08-02 上传
117 浏览量
2021-11-23 上传
2021-11-23 上传

Omron-??
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
